新一代信息技术
黄牛骨多肽矿物质螯合物、制备方法及应用
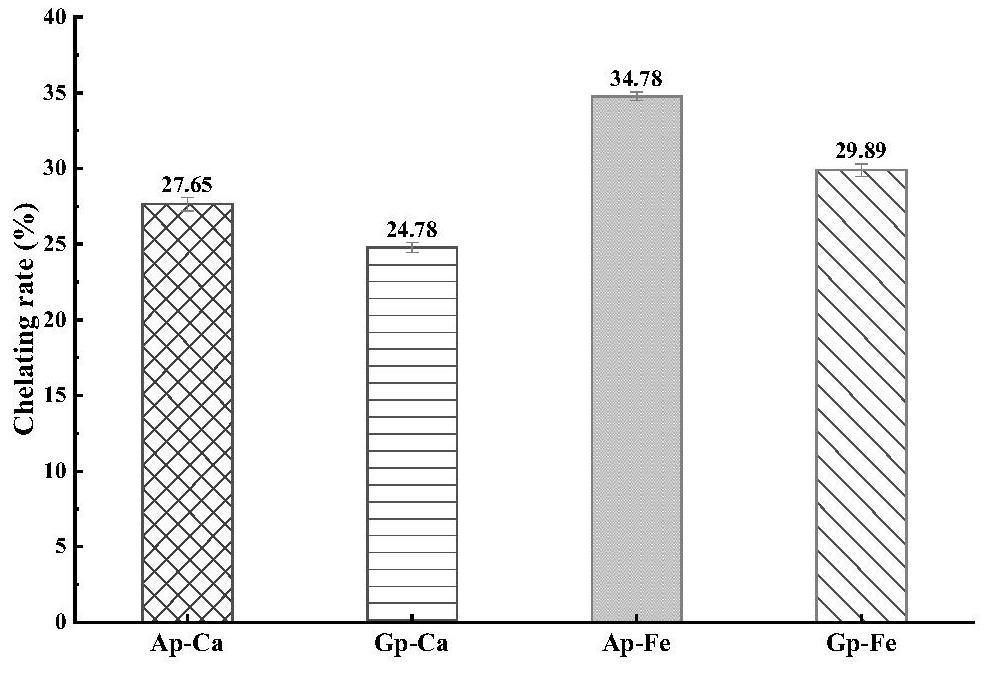
本发明揭示了一种黄牛骨多肽矿物质螯合物、制备方法及应用,方法包括:原料预处理:牛骨切块、烘干、粉碎、过筛,过筛后得到的牛骨粉加入正己烷,在40℃下进行脱脂;黄牛骨蛋白的制备:称取脱脂后的牛骨粉,按料液比加入蒸馏水、再经过碱液提取、酸液沉淀、冷冻干燥,得到黄牛骨蛋白粉;蛋白多肽粉制备:称取适量黄牛骨蛋白粉,按料液比添加蒸馏水,经过酶解、沸水灭酶、冷却后离心,得到多肽液,并经过冷冻干燥得到多肽粉;多肽矿物质螯合物制备:将上述多肽粉溶于去离子水、调节pH、加入矿物质元素经过水浴加热、醇沉、离心得到的沉淀进行冷冻干燥,得到多肽螯合物粉末。本发明的黄牛骨清、球蛋白多肽与钙、铁离子螯合程度好,具有较强的抗氧化作用。
延边大学