生物医药
一种软枣猕猴桃类外泌体样纳米颗粒在制备改善肠道菌群产品中的应用
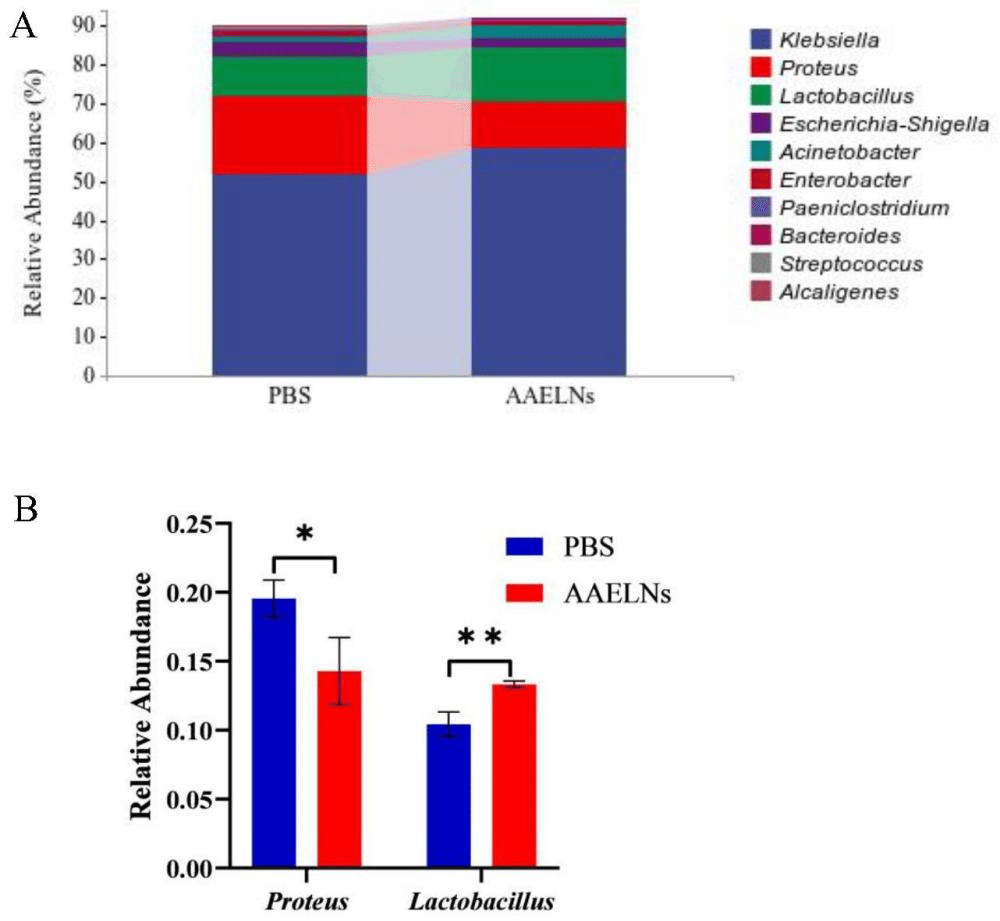
本发明提供了一种软枣猕猴桃类外泌体样纳米颗粒在制备改善肠道菌群产品中的应用,属于生物制备技术领域,包括将软枣猕猴桃果实的汁液进行3500~4500g离心5~15min取上清液a、上清液a6500~7500g离心15~25min取上清液b、上清液b9500~10500g离心25~35min取上清液c、上清液c119000~121000g离心65~75min取沉淀1,将沉淀1用无菌PBS缓冲液吹打重悬得到重悬液1,重悬液1119000~121000g离心65~75min得到沉淀2,PBS缓冲液重悬沉淀2,即得。本发明制备得到的AAELNs具有改善肠道菌群的作用。
延边大学