新一代信息技术
一种适用于共聚焦显微成像的复合力环境多细胞器官芯片
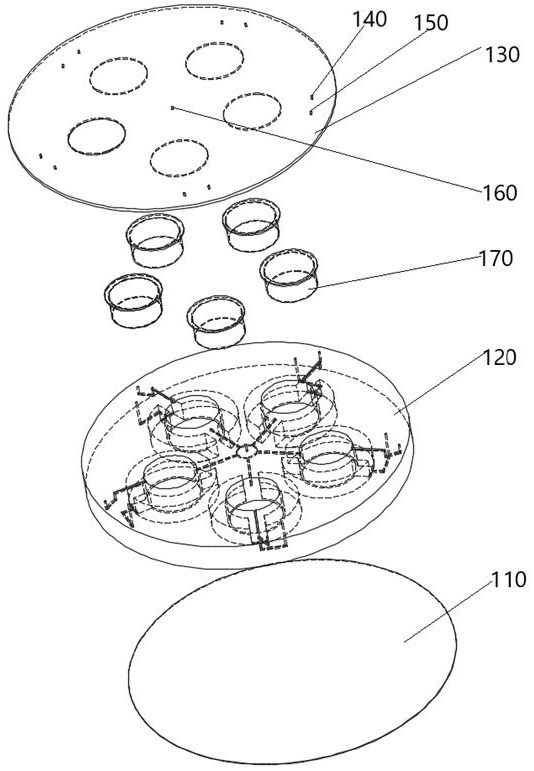
本发明公开了一种适用于共聚焦显微成像的复合力环境多细胞器官芯片,包括:第一层;第二层,其覆盖在第一层顶部;多个细胞培养仓,其为贯穿第二层的圆形通孔;多个气槽,其为开设在第二层底部的凹槽,气槽一一对应的围绕细胞培养仓设置;其中,气槽和位于气槽底部的第一层组成气囊;第三层,其覆盖在第二层的顶部;其中,第一层、第二层和第三层均为PDMS材质;多个气囊出气通道,其一端开设在第三层顶部,另一端贯穿第三层,并且一一对应的与气囊连通;多个培养仓加样通道,其一端开设在第三层顶部,另一端贯穿第三层,并且一一对应的与细胞培养仓连通;培养仓排气通道,其一端开设在第三层顶部,另一端贯穿第三层,并且与多个细胞培养仓同时连通。
吉林医药学院