材料化工
一种口腔异物吸附器
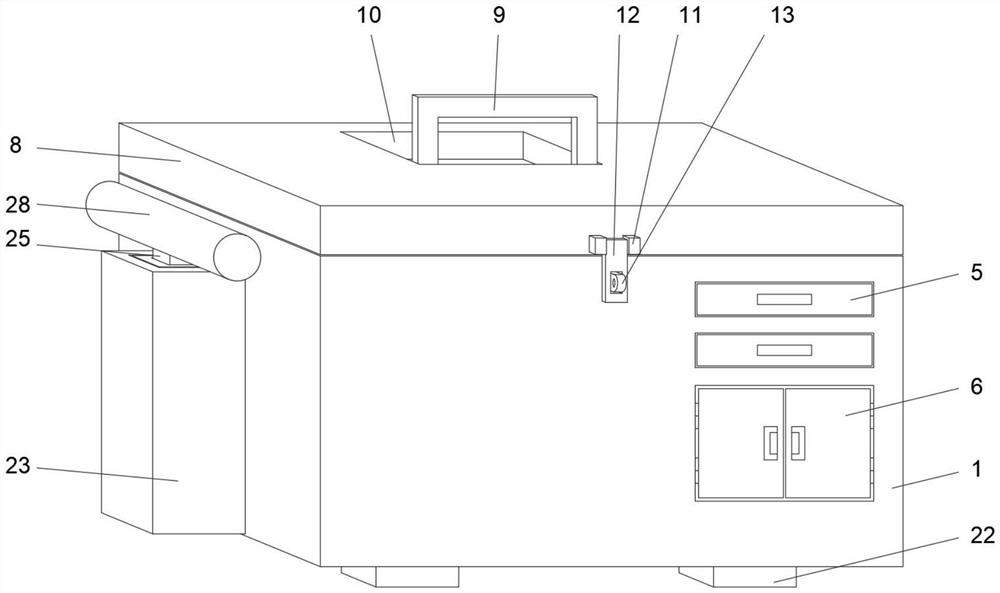
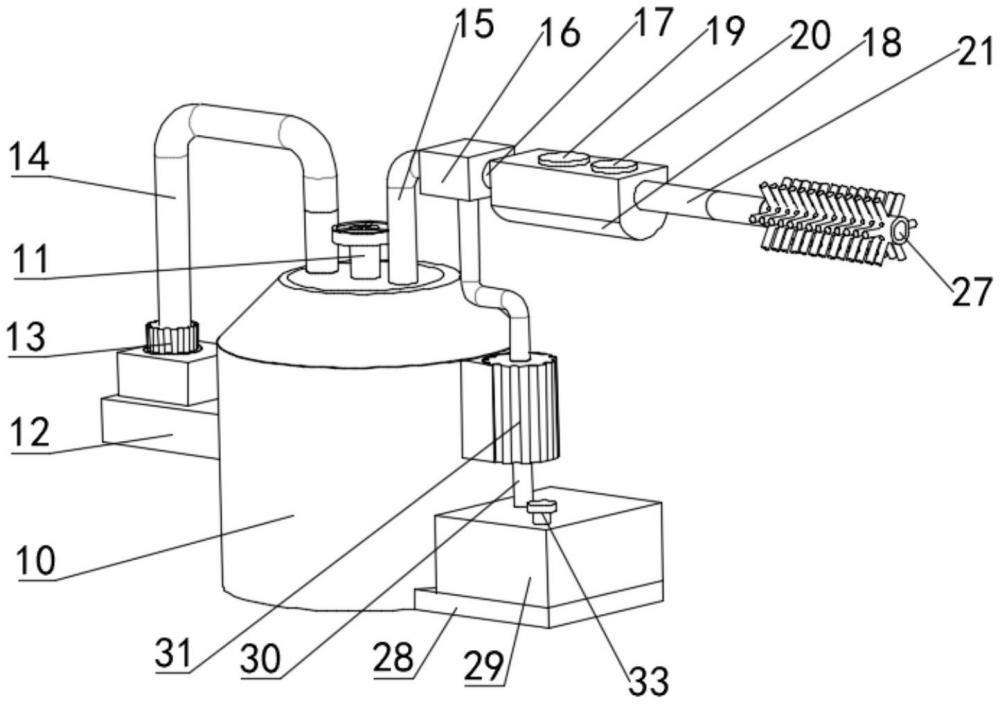
本实用新型涉及口腔护理技术领域,且公开了一种口腔异物吸附器包括异物储存罐,异物储存罐装配开关阀和固定板,固定板装配微型抽风机,微型抽风机装配抽风管,异物储存罐装配第一分支管,第一分支管装配控制阀,控制阀装配连接管,连接管装配控制手柄,控制手柄上设置有第一按钮和第二按钮,控制手柄装配安装管,安装管装配替换杆,替换杆装配纤维毛刷,替换杆上设置出水孔和吸附口,异物储存罐装配装配板和微型水泵,装配板装配储水箱,储水箱装配进水管和进水口,微型水泵装配第二分支管,上述一种口腔异物吸附器通过微型水泵泵入清水对口腔内部进行清洁解决了现有的清理完口腔异物后清理不彻底,影响口腔健康的问题。
吉林医药学院附属医院