材料化工
多苯基锡桥联共轭结构化合物及其制备方法和应用
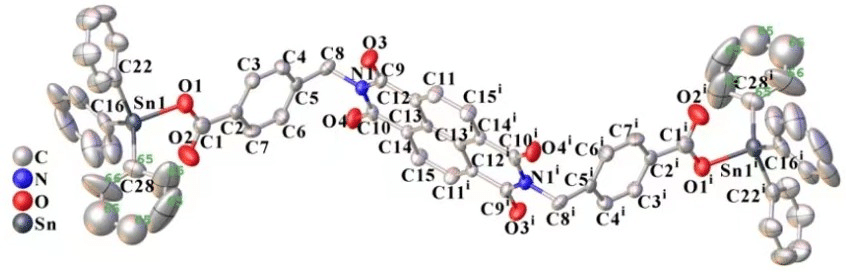
本发明公开了多苯基锡桥联共轭结构化合物及其制备方法和应用,属于金属配合物技术领域,多苯基锡桥联共轭结构化合物通过以1,4,5,8‑萘四甲酸二酐与对氨甲基苯甲酸的反应产物作为配体,三苯基氢氧化锡为底物制备。制备方法操作简单,条件温和。本发明的多苯基锡桥联共轭结构化合物可作为光催化剂用于光催化生产H2O2,在反应光源为425 nm下,光催化生产H2O2的速率高达11407.75 μmol h‑1g‑1,远高于现有文献中报道的光催化剂的光催化生产H2O2的速率。
吉林医药学院