生物医药
一种胰腺癌早期筛查的体内微创精准取材装置及方法
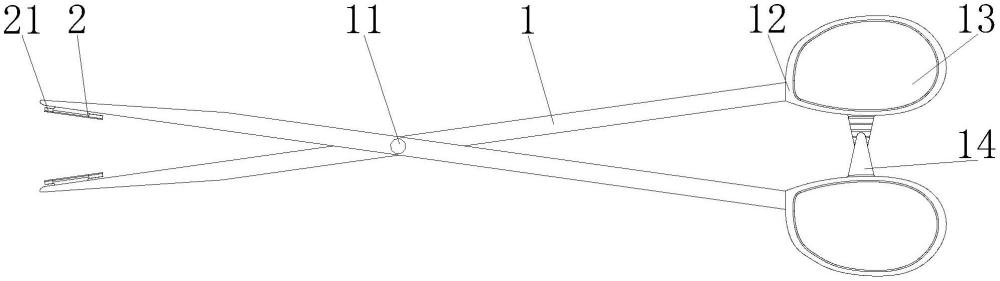
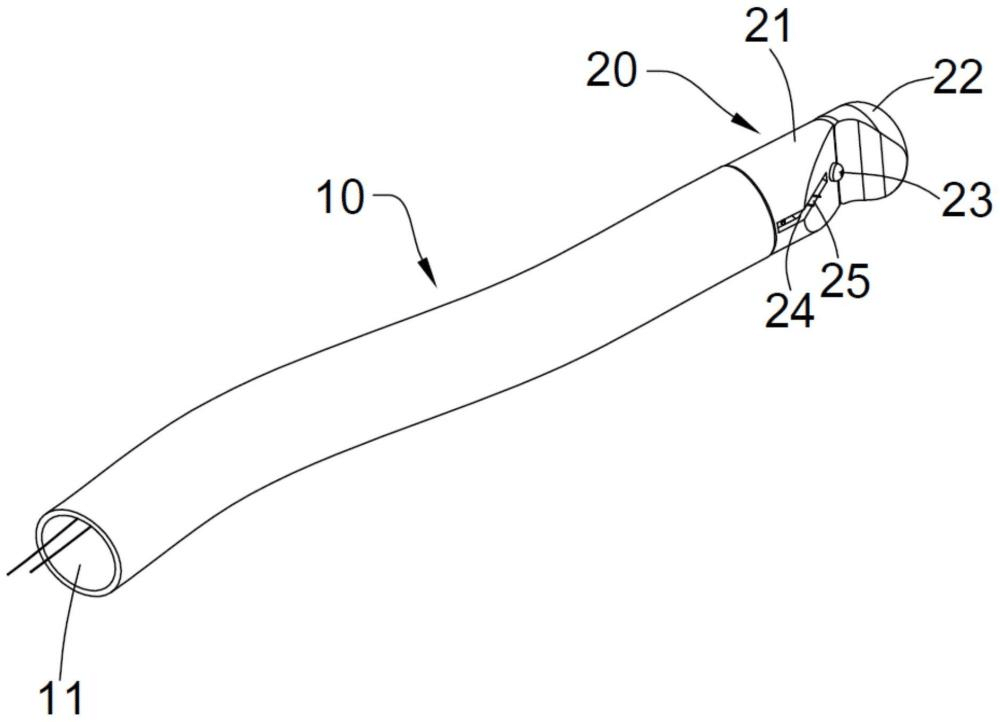
本发明提供一种胰腺癌早期筛查的体内微创精准取材装置及方法,其包括探测主体、穿刺组件和探测管体,探测主体具有外壳体、超声探头和摄像头,穿刺组件具有安装板、驱动电机、驱动杆、从动杆组、折叠杆组、支撑杆,所述驱动电机的输出轴穿过所述安装板而与所述驱动杆连接,所述驱动杆与所述从动杆组的一端连接。通过驱动电机提供动力,相应地使得驱动杆转动,驱动杆转的过程中则会使得从动杆组和折叠杆组进行运动和折叠收纳,并且在中间转换的状态中实现对于超声定位部位的取样过程。设置了两个穿刺针体从而能够同时完成两个样品的取样过程,由此提高取样效率,缩短操作时间。并且其取样的角度还可以适当调节,由此实现多个位置及角度的取样。
延边大学