

| 专利名称 | 一种气动式蛇形软体机器人 | ||
|---|---|---|---|
| 申请号/专利号 | CN202411515541.8 | 专利权人(第一权利人) | 北华大学 |
| 申请日 | 2024-10-29 | 授权日 | 2025-01-14 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 脚支撑|机器人技术|物理学|模块化结构|类机器人 | ||
| 应用领域 | 程序控制机械手 | ||
| 意向价格 | 具体面议 | ||
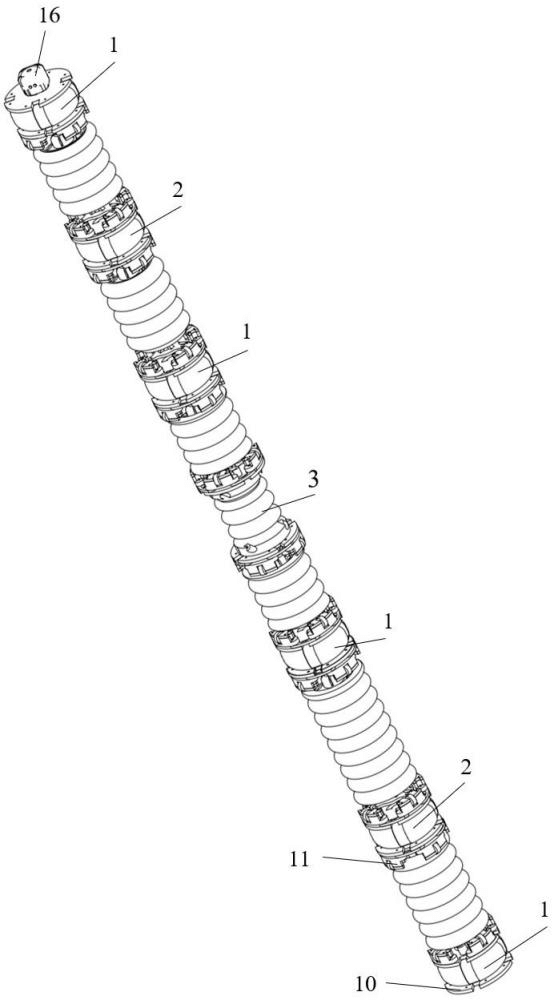
| 专利概述 | 本发明涉及机器人技术领域,具体为一种气动式蛇形软体机器人,包括:锚固足单元、支撑足单元、躯体、电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元、供电模块、足支架组件、躯体支架以及球铰支座,本发明的软体机器人采用串联式的模块化设计,通过球铰支座将电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元和供电模块由前至后依次串接于各锚固足、支撑足和躯体之间,组成了串联的模块化结构,串联式设计使各个模块相互独立又相互联系,同时便于添加新功能模块以适应新的工作需求。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










