

| 专利名称 | 一种流体驱动多节分控式变刚度柔性手 | ||
|---|---|---|---|
| 申请号/专利号 | CN202510920061.8 | 专利权人(第一权利人) | 北华大学 |
| 申请日 | 2025-07-04 | 授权日 | 2025-08-29 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机械工程|类人型机器人|电子控制器|指接|物理学|类机器人 | ||
| 应用领域 | 夹头 | ||
| 意向价格 | 具体面议 | ||
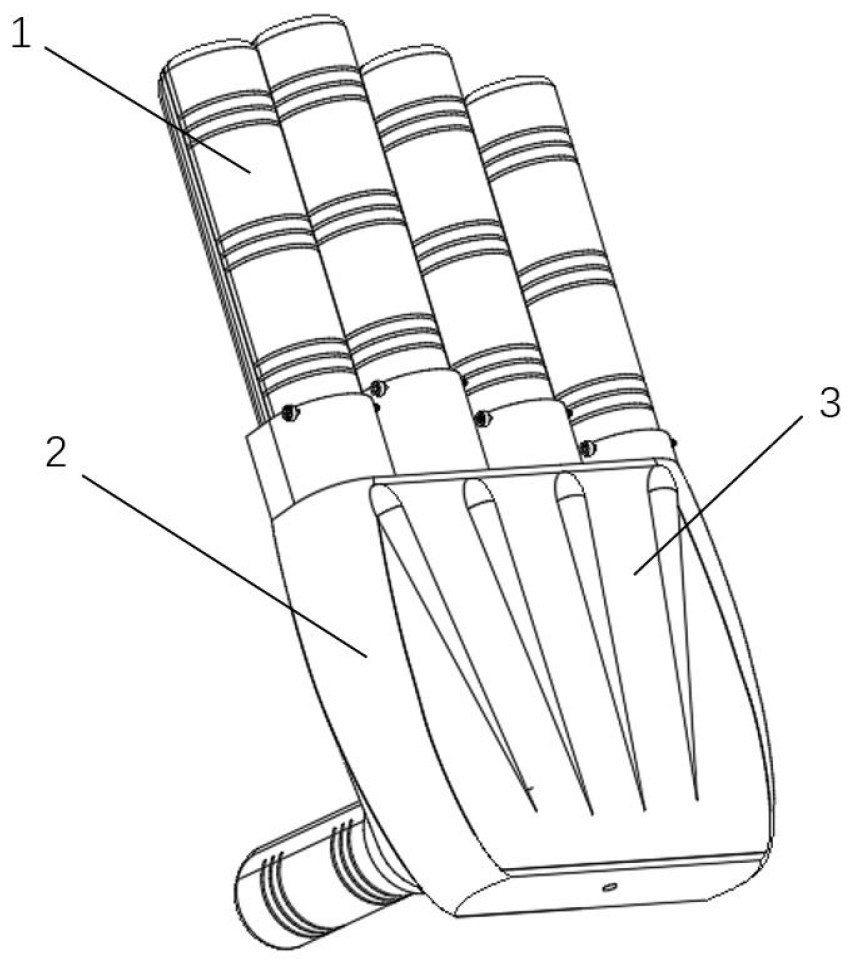
| 专利概述 | 本发明公开了一种流体驱动多节分控式变刚度柔性手,涉及仿人机器人领域,包括变刚度柔性指、掌体、掌盖、电控单元和六通组合流体阀,变刚度柔性指中的安装孔对应安装在掌体的上端面和安装槽孔内,电控单元与六通组合流体阀并排放置于掌体空腔内,掌盖和掌体固定连接。本发明采用上述的一种流体驱动多节分控式变刚度柔性手,采用多节分控式设计,在柔性指体内置多个电控流体微阀,分别实现各柔指关节的独立控制;设置刚度调节层,进一步提升柔性手抓持物体的稳定性;采用机电集成方式,掌体内包含电控单元与六通组合流体阀,减少了冗余缆线束缚,进一步提高工作效率。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










