

| 专利名称 | 压电微动平台基于Hopfield神经网络估计器的自适应控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202210045711.5 | 专利权人(第一权利人) | 吉林大学 |
| 申请日 | 2022-01-16 | 授权日 | 2023-09-19 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 双五星 |
| 技术主题 | 机器学习|人工智能|线性化|控制理论|神经网络|非线性|非线性函数|算法设计|自适应控制 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
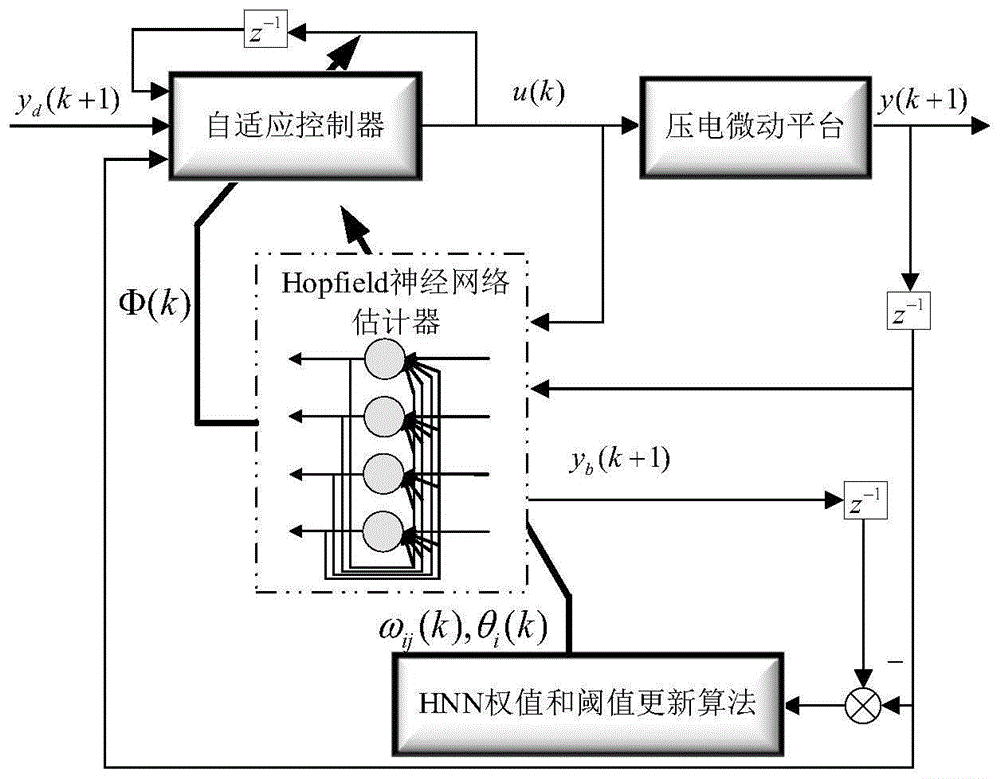
| 专利概述 | 本发明涉及一种压电微动平台基于Hopfield神经网络估计器的自适应控制方法,属于微纳控制技术领域。将压电微动平台表征为带有迟滞输入的离散非仿射非线性函数的形式,在广义Lipschitz条件下,采用动态线性化方法和最优算法设计自适应控制器,然后设计Hopfield神经网络估计器对控制器未知参数进行在线调整,该方法利用系统已知的先验知识将系统迟滞非线性描述为可公式化的Bouc‑Wen模型,避免对影响系统性能敏感因素考虑不全而导致闭环系统精度不高甚至失稳的问题。Hopfield神经网络估计器对系统输出值进行估计,直观地反应估计器性能,所设计控制器无需离线建模就能实现压电微动平台的高精度跟踪控制。 | ||
| 图片资料 |
|
||
| 合作方式 | 拟许可 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










