

| 专利名称 | 融合驾驶模式信息的汽车预测巡航参数自整定控制系统 | ||
|---|---|---|---|
| 申请号/专利号 | CN202110563042.6 | 专利权人(第一权利人) | 吉林大学 |
| 申请日 | 2021-05-24 | 授权日 | 2022-04-01 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 双五星 |
| 技术主题 | 控制系统|计算机科学|自整定|驾驶模式|可靠性工程|多目标优化|车辆驾驶|控制器设计|贝叶斯优化|智能网|信息获取|汽车驾驶 | ||
| 应用领域 | 控制装置 | ||
| 意向价格 | 具体面议 | ||
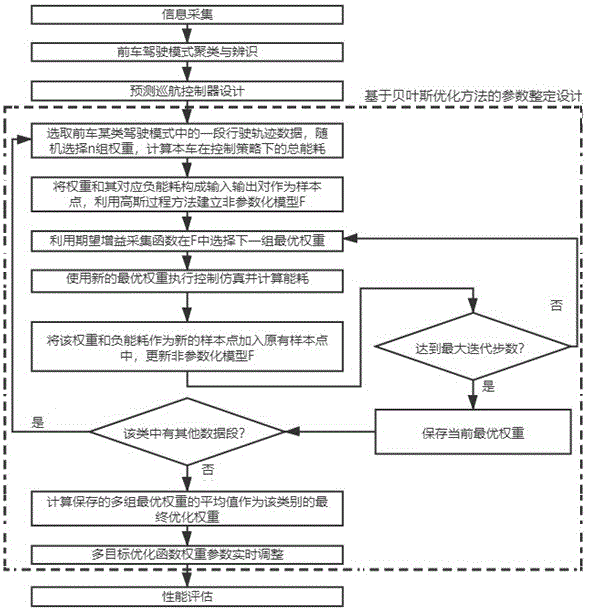
| 专利概述 | 一种考融合驾驶模式辨识信息的网联汽车预测巡航参数自整定控制系统,属于智能网联汽车节能控制领域。本发明的目的是通过数据挖掘的手段对车辆驾驶模式进行辨识,提升车辆燃油经济性的同时大幅降低了多目标优化控制权重整定工作量的融合驾驶模式信息的汽车预测巡航参数自整定控制系统。本发明步骤是:信息采集、前车驾驶模式聚类与辨识、预测巡航控制器设计、基于贝叶斯优化方法的参数整定设计。本发明能够快速准确地求出一组最优权重参数,这有效避免了人为选择权重时所需要的大量试错,大幅减少权重参数调整的人力,并在一定程度上改善驾驶舒适度和跟踪性能。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










