

| 专利名称 | 基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手 | ||
|---|---|---|---|
| 申请号/专利号 | CN202110438736.7 | 专利权人(第一权利人) | 吉林大学 |
| 申请日 | 2021-04-23 | 授权日 | 2024-05-10 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 双五星 |
| 技术主题 | 按摩|物理治疗|机械手|康复医学 | ||
| 应用领域 | 压迫反射点的仪器|振动按摩|治疗处理用的冷却器具|治疗处理用的加热器具 | ||
| 意向价格 | 具体面议 | ||
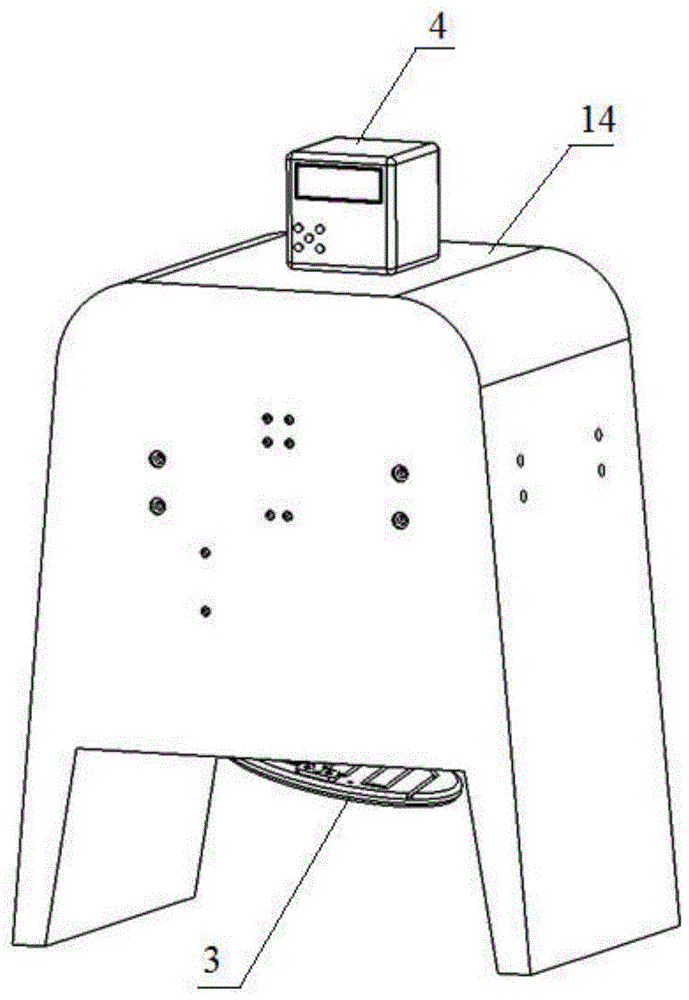
| 专利概述 | 本发明公开了一种基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手,包括有滑台、定位架、按摩振动板和控制器,其中滑台装配在定位架中心的安装口内,滑台内螺接有第一螺杆和第二螺杆,第一螺杆和第二螺杆上下交错呈垂直方向螺接在滑台内,定位架的左右两侧的侧壁上对称开设有第一滑槽,第一螺杆的两端分别枢接在定位架左右两侧的第一滑槽内,定位架的前后两侧的侧壁上对称开设有第二滑槽,第二螺杆的两端分别枢接在定位架前后两侧的第二滑槽内;有益效果:规避了人为操作时可能产生的疲劳而降低揉腹手法的频数和力度的问题,确保动作的精度和速度。 | ||
| 图片资料 |
|
||
| 合作方式 | 拟许可;拟转让 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










