

| 专利名称 | 考虑约束条件的压电陶瓷微定位平台轨迹跟踪控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202010481100.6 | 专利权人(第一权利人) | 吉林大学 |
| 申请日 | 2020-05-31 | 授权日 | 2022-09-27 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 双五星 |
| 技术主题 | 机械工程|控制工程|预测控制器|位置控制|系统稳定性|粒子群优化|控制算法|定位系统|动作控制 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
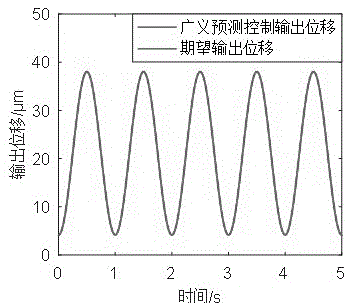
| 专利概述 | 一种考虑约束条件的压电陶瓷微定位平台轨迹跟踪控制方法,属于精密运动控制领域。本发明的目的是采用一种广义预测控制补偿迟滞特性对于压电陶瓷微定位平台在精确定位中的影响。本发明首先建立能够描述压电陶瓷微定位平台特性的约束模型,由迟滞部分和线性部分构成;然后构建约束广义预测控制器框架,利用预测模型获得压电定位系统的预测未来时刻输出值;并利用粒子群优化算法代替传统广义预测控制算法中的滚动优化过程,之后按照粒子群优化算法的位置与速度更新方式进行粒子寻优直到达到最大迭代次数;最后得到压电定位系统当前时刻控制量,并且证明系统稳定性。本发明能够满足系统约束条件并减少迟滞特性对压电陶瓷微定位平台定位控制的不良影响,实现精密轨迹跟踪控制。 | ||
| 图片资料 |
|
||
| 合作方式 | 拟许可 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










