

| 专利名称 | 压电驱动微定位平台的无抖振滑模控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202010454454.1 | 专利权人(第一权利人) | 吉林大学 |
| 申请日 | 2020-05-26 | 授权日 | 2023-02-03 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 双五星 |
| 技术主题 | 机械工程|控制工程|预测算法|控制信号|运动控制|粒子群优化|滑动模式控制|系统建模|动作控制 | ||
| 应用领域 | 数字控制 | ||
| 意向价格 | 具体面议 | ||
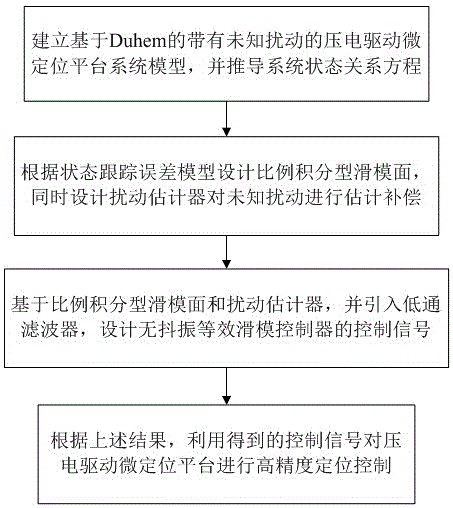
| 专利概述 | 一种压电驱动微定位平台的无抖振滑模控制方法,属于精密运动控制领域。本发明的目的是采用基于粒子群的约束广义预测算法实现平台精密定位控制的压电驱动微定位平台的无抖振滑模控制方法。本发明的步骤是:建立基于Duhem的带有未知扰动的压电驱动微定位平台系统模型,并且根据其系统模型推导出压电驱动微定位平台系统状态关系方程;设计基于扰动估计器的无抖振等效滑模控制器,得到控制信号,并且控制压电驱动微定位平台系统状态关系方程,从而实现对压电驱动微定位平台的高精度定位控制。本发明用粒子群优化算法代替广义预测控制中的滚动优化过程对输入约束与输入变化率约束进行处理,实现压电陶瓷微定位平台的精密定位控制,可扩展到更多优化问题的求解,解决更多领域的问题。 | ||
| 图片资料 |
|
||
| 合作方式 | 拟许可;拟转让 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










