

| 专利名称 | 基于舵机驱动的高压输电巡线及作业机器人手臂 | ||
|---|---|---|---|
| 申请号/专利号 | CN201510827715.9 | 专利权人(第一权利人) | 长春理工大学 |
| 申请日 | 2015-11-25 | 授权日 | 2017-07-18 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 双五星 |
| 技术主题 | 机械手臂|重心|高压|高压电|高压传输线|伺服驱动|手掌|肘|质心|前臂|齿轮传动|控制理论|机器人技术|引力 | ||
| 应用领域 | 程序控制机械手|接头|夹头|爪臂 | ||
| 意向价格 | 具体面议 | ||
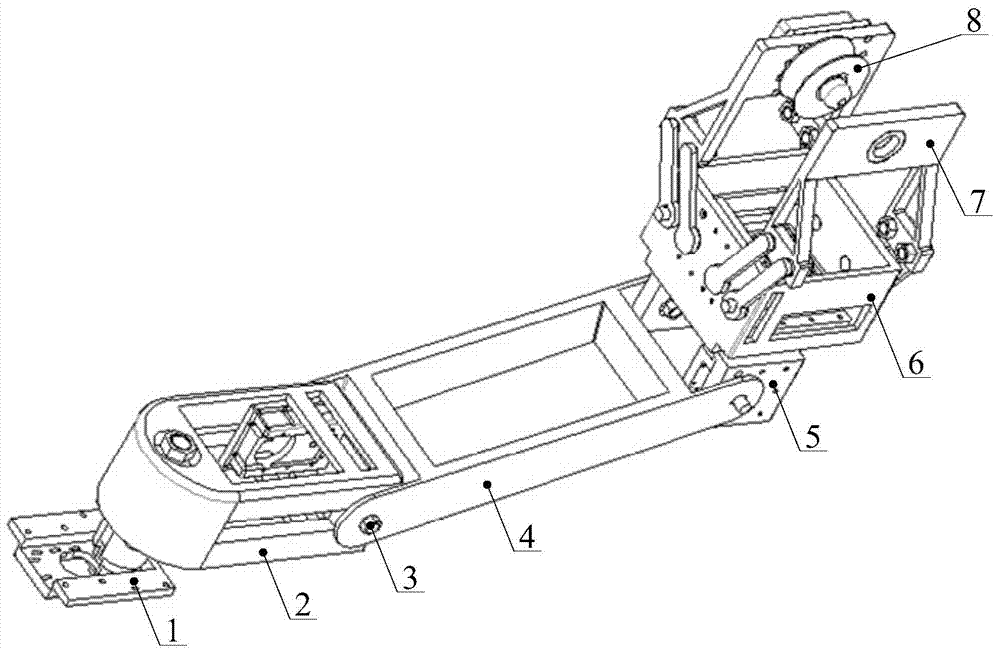
| 专利概述 | 基于舵机驱动的高压输电巡线及作业机器人手臂属于特种机器人技术领域,目的在于解决现有技术存在的重心不稳、稳定性低、结构复杂和控制麻烦的问题。本发明的基于舵机驱动的高压输电巡线及作业机器人手臂的大臂为壳体结构,小臂为双板结构,大臂一端通过精密旋转轴系驱动机构与肩部连接,另一端内接在小臂的一端形成肘部,小臂的另一端外接在手腕上,手腕的另一端与手掌的一段通过转轴A连接,两个手指安装在手掌另一端的两侧,相对的两个手指内侧分别通过转轴B和一个行走轮连接;分别通过一组送礼驱动装置驱动小臂相对大臂做俯仰运动,手腕相对小臂做俯仰运动,手掌相对于手腕做旋转运动,两个手指相对于手掌做开合运动,行走轮相对手指转动。 | ||
| 图片资料 |
|
||
| 合作方式 | 拟许可 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










