| 专利名称 |
面向约束的可重构机械臂非奇异终端滑模力位置控制方法 |
| 申请号/专利号 |
CN201610970851.8 |
专利权人(第一权利人) |
长春工业大学 |
| 申请日 |
2016-11-01 |
授权日 |
2020-05-12 |
| 专利类别 |
授权发明 |
战略新兴产业分类 |
新一代信息技术 |
| 技术主题 |
系统动力学模型|控制工程|机器人|控制信号|位置控制|机器人控制|终端滑动模式控制|控制力|神经网络|非线性|机械手系统 |
| 应用领域 |
程序控制机械手|几何CAD|基于约束的CAD|特殊数据处理应用 |
| 意向价格 |
具体面议 |
| 专利概述 |
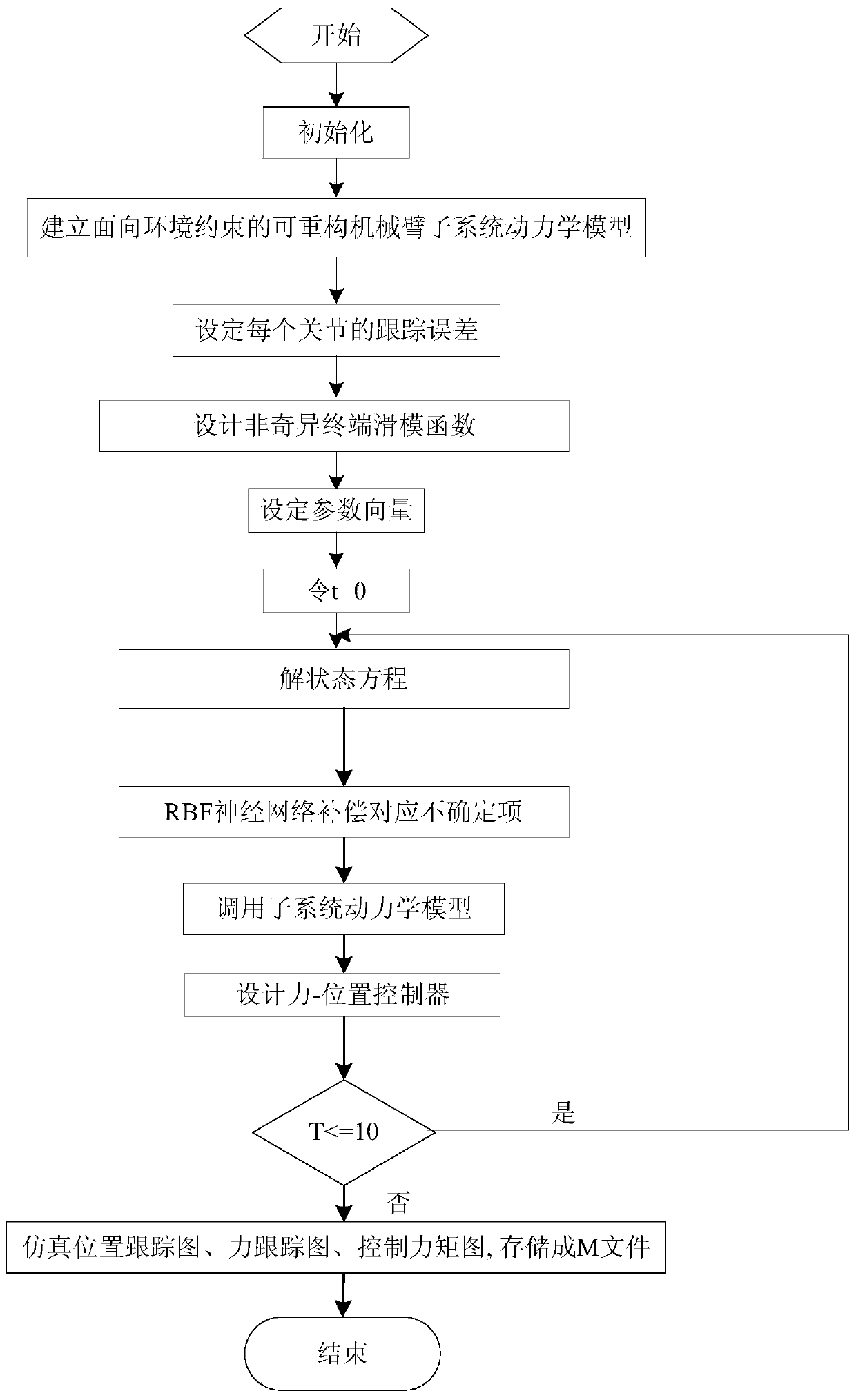
面向约束的可重构机械臂非奇异终端滑模力位置控制方法,属于机器人控制方法及受约束系统控制方法领域,为了解决传统终端滑模控制力位置控制方法中存在的跟踪精度低、收敛速度慢、存在抖振的问题,在建立面向约束的可重构机械臂系统动力学模型的基础上,提出一种新颖的非奇异终端滑模函数,引入了RBF神经网络来补偿系统未知非线性项、关节之间耦合项和模型不确定项,并发明了非奇异终端滑模力位置控制方法,使得轨迹跟踪误差在有限时间内收敛到零,同时控制器本身具有较强的鲁棒性,使得控制器抖振效应得到有效抑制,并使控制信号在整个过程中变得光滑,而且保证了轨迹的跟踪精度,实现高精度、微抖振的可重构机械臂系统力位置控制。 |
| 图片资料 |
|
| 合作方式 |
具体面议 |
| 联系人 |
戚梅宇 |
联系电话 |
13074363281 |












