| 专利名称 |
基于自适应动态规划的可重构机械臂保代价分散控制方法 |
| 申请号/专利号 |
CN201810851336.7 |
专利权人(第一权利人) |
长春工业大学 |
| 申请日 |
2018-07-30 |
授权日 |
2021-06-22 |
| 专利类别 |
授权发明 |
战略新兴产业分类 |
新一代信息技术 |
| 技术主题 |
动态模型|迭代法|绩效指标|动态计划|动态规划|自适应|神经网络|控制算法|系统工程|电机|控制系统|控制工程|机器人|两个自由度|机器人控制系统|离心力|机械手|科里奥利力|动力学模型|能源消耗 |
| 应用领域 |
程序控制机械手 |
| 意向价格 |
具体面议 |
| 专利概述 |
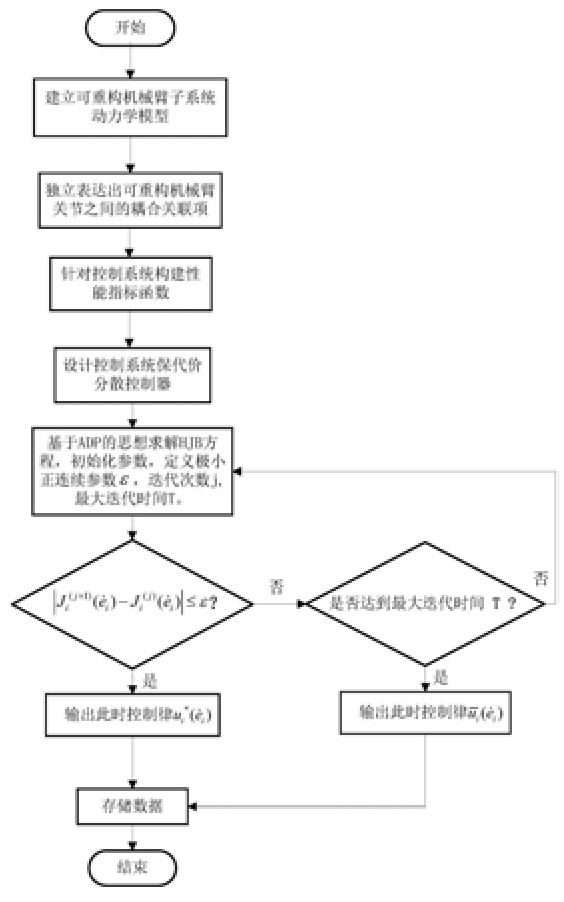
基于自适应动态规划的可重构机械臂最优保代价分散控制方法,属于机器人控制系统及控制算法领域,为了解决传统的可重构机械臂控制方法中关节耦合的交联项对系统整体控制干扰、可重构机械臂重构及控制过程中能耗问题、电机实际工作过程中不确定性允许范围问题,该方法构建可重构机械臂子系统的动力学模型,并且用可重构机械臂惯性项、哥氏力和离心力项、重力项将各个关节之间的耦合交联项单独表示出来,构建性能指标函数和HJB方程,通过基于ADP策略迭代的方法求解HJB方程,运用神经网络补偿关节之间的耦合交联不确定项,最后通过不同构形二自由度的机械臂数值仿真验证了算法的有效性;实现了可重构机械臂的高精度控制。 |
| 图片资料 |
|
| 合作方式 |
具体面议 |
| 联系人 |
戚梅宇 |
联系电话 |
13074363281 |












