

| 专利名称 | 一种基于动态规划的模块化机械臂多故障容错控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN201910259785.7 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2019-04-02 | 授权日 | 2022-11-04 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 动态模型|绩效指标|动态规划|系统故障|自适应|神经网络|系统工程|计算机科学|控制工程|机械手|容错控制器|动力学模型|模块化 | ||
| 应用领域 | 程序控制机械手|全面工厂控制 | ||
| 意向价格 | 具体面议 | ||
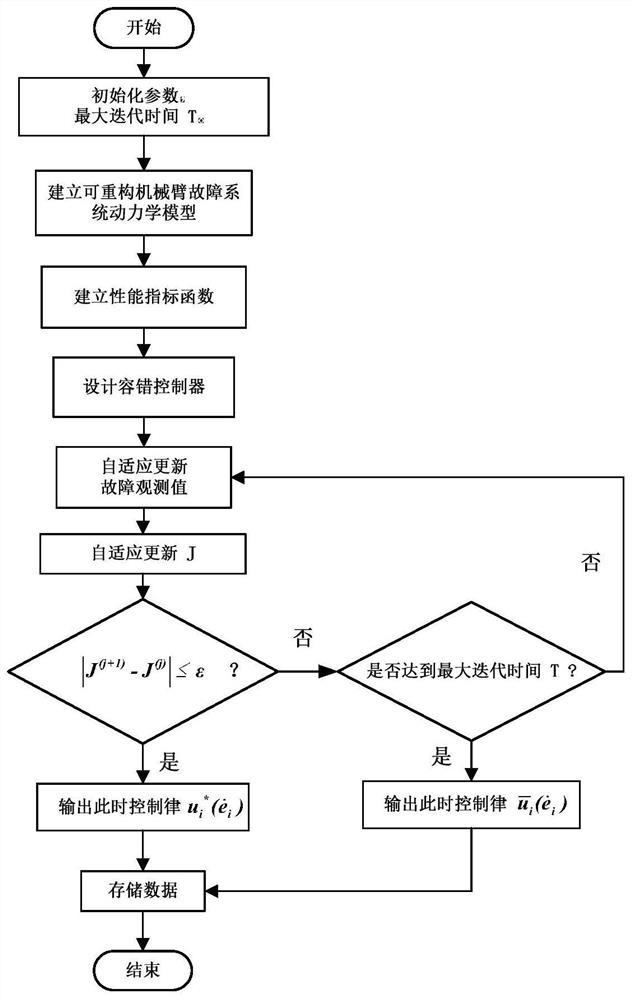
| 专利概述 | 本发明公开了一种基于自适应动态规划的可重构机械臂多故障容错控制方法,构建可重构机械臂系统的动力学模型及多故障动力学模型;根据多故障动力学模型,给出性能指标函数;设计自适应故障观测器,对系统故障进行故障估计;构建评价网络,利用神经网络近似估计性能指标函数;完成最优容错控制器的设计。本发明方法具有控制结构简单紧凑、减小控制过程计算量等优点。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










