

| 专利名称 | 一种四轮驱动电动汽车的集成底盘控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN201910454983.9 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2019-05-29 | 授权日 | 2021-07-20 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 驾驶员|电动载具|扭矩分配|控制算法|力学模型|电机|控制工程|模型预测控制|四轮驱动|控制理论|底盘|动力学模型|轮驱动 | ||
| 应用领域 | 内燃活塞发动机|控制装置 | ||
| 意向价格 | 具体面议 | ||
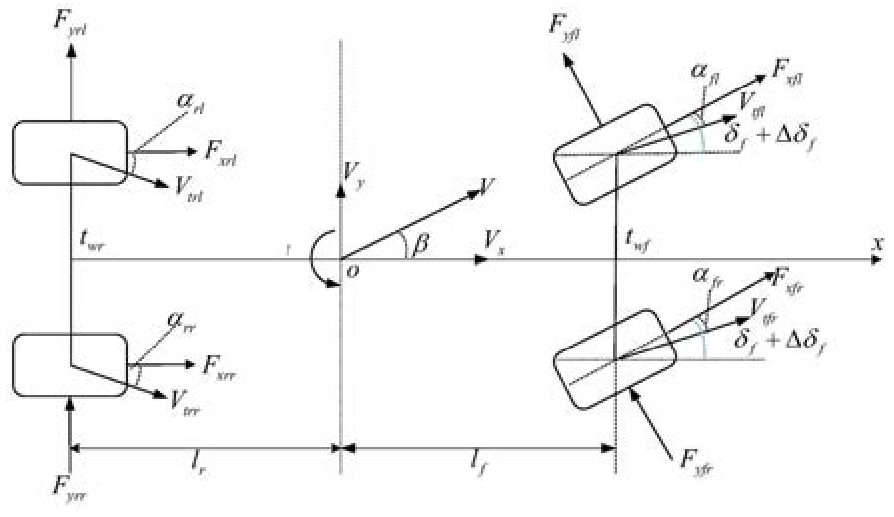
| 专利概述 | 本发明属于电动汽车领域,具体的说是一种四轮驱动电动汽车的集成底盘控制方法。本发明利用分布驱动电动汽车动力学模型即十四自由度车辆操纵模型、UniTire轮胎模型、电机控制模型以及驾驶员模型设计了车辆状态与参数在线估计系统、质心侧偏角观察器、稳定性判断系统、集成协调底盘控制模型、模型预测控制、考虑约束的多步中心矫正内点优化算法;通过分析二自由度车辆模型,得到参考状态轨迹、参考期望控制变量的离线优化系统。本发明将主动前轮转向和直接横摆力矩控制两种控制方法结合起来,通过优化车辆底盘控制结构、合理设计集成底盘控制算法和优化调度电机的力矩分配提高车辆的操纵稳定性。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










