

| 专利名称 | 一种基于Q学习算法的对角递归神经网络控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202010502825.9 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2020-06-05 | 授权日 | 2022-05-10 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 机器学习|工程学|隐藏层|抗干扰|人工智能|模式识别|控制效果|直流电动机|神经网络|算法|动量因子|对角递归神经网络 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
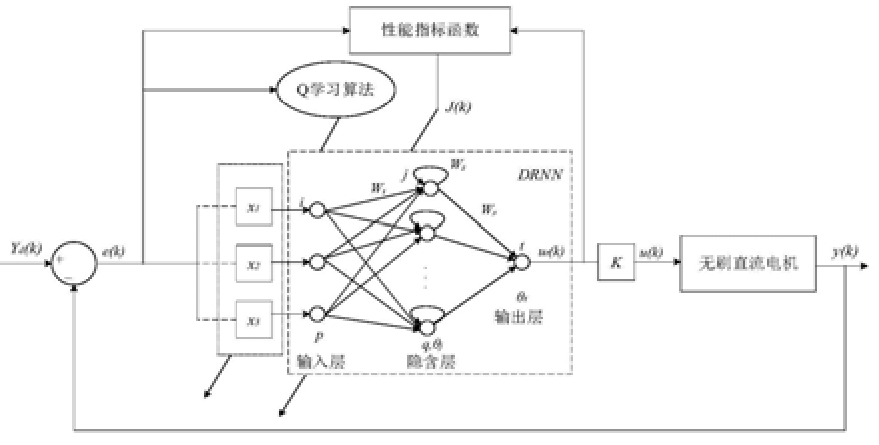
| 专利概述 | 本发明设计了一种基于Q学习算法的对角递归神经网络(DRNN)控制方法(Q‑DRNN),Q‑DRNN将Q学习的强搜索能力与DRNN的自带递归环结构、动态映射能力以及适应时变性等优势有机结合,用于提高无刷直流电机(BLDCM)的工作稳定性。在Q‑DRNN中,DRNN通过隐含层中独有的递归环对输出变量进行迭代,并对其关键权重进行优化,以加快迭代速度。同时,引入改进的Q学习对DRNN的权动量项因子进行修正,使DRNN具有自学习和在线修正的能力,使得系统的抗干扰能力增强、鲁棒性增强,从而使无刷直流电机达到更好的控制效果。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










