

| 专利名称 | 基于单评判网络的可重构机器人零和神经最优控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202010805559.7 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2020-08-12 | 授权日 | 2021-07-16 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 动态模型|最优控制|机器人控制|神经网络|非线性|控制算法|稳态误差|动力学模型|仿真|机器人系统 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
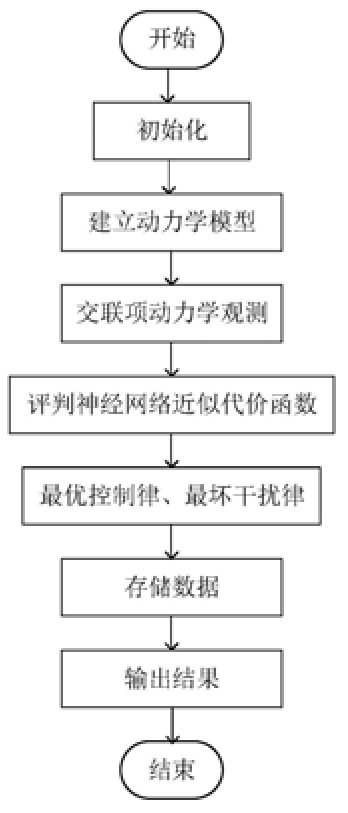
| 专利概述 | 基于单评判辨网络的可重构机器人系统的零和神经最优控制方法,属于机器人控制算法领域,为了解决现有技术中存在不确定性干扰的问题,该方法首先建立可重构机器人系统的动力学模型,其次构建代价函数与HJI方程,通过基于策略迭代的学习算法,来求HJI方程的解,然后通过对可重构机器人关节子系统间的耦合交联项的观测,接下来采用神经网络对代价函数进行近似,最后通过仿真验证所提出控制方法的有效性。该方法改善了系统的跟踪性能,并且采用了单评判神经网络对未知非线性项的计算负担,关节位置的稳态误差减小;不仅可以保持系统渐进稳定,而且可以降低每个关节的能量损耗;为可重构机器人提供稳定性和精确性,并且可以满足各种任务的需求。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










