| 专利名称 |
一种基于改进A*算法的无人机航路规划方法 |
| 申请号/专利号 |
CN202010965671.7 |
专利权人(第一权利人) |
长春工业大学 |
| 申请日 |
2020-09-15 |
授权日 |
2024-01-19 |
| 专利类别 |
授权发明 |
战略新兴产业分类 |
新一代信息技术 |
| 技术主题 |
无人机|路径长度|路径计划|特征选择|改进算法|路线规划|仿真|实时计算|规划算法 |
| 应用领域 |
导航计算工具|车辆位置/路线/高度控制|位置/方向控制 |
| 意向价格 |
具体面议 |
| 专利概述 |
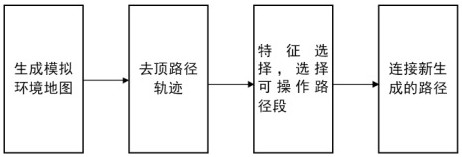
本发明提出使用基于改进A*算法的无人机路径规划算法对运动路径进行优化,通过对路径轨迹进行放大,细化等操作来减少实际运动路径轨迹长度,达到减少路径长度的目的。具体步骤如下:首先是生成模拟环境地图,根据无人机运动场景的信息进行建模,生成所要执行的模拟环境地图;然后是确定路径轨迹,建立无人机活动的起始点与目标点,将无人机走过的路线连接起来,确定路径轨迹;接下来进行特征选择,将确定的路径轨迹,在变换方向时将存在一定角度的两段轨迹夹角周围进行弧线代替;最后是连接新生成的路径,将部分替换路径与原始未变路径连接,得到改进后的新路径。 |
| 图片资料 |
|
| 合作方式 |
具体面议 |
| 联系人 |
戚梅宇 |
联系电话 |
13074363281 |












