

| 专利名称 | 一种基于语义分割动态点的视觉SLAM方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111024116.5 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-09-02 | 授权日 | 2024-07-26 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 视觉|动态功能|核医学|视觉方法|视角|影像诊断学|物理学|语义图|特征提取|对象检测|多视角|视觉技术 | ||
| 应用领域 | 图像增强|图像分析|字符和模式识别|神经学习方法|3D建模 | ||
| 意向价格 | 具体面议 | ||
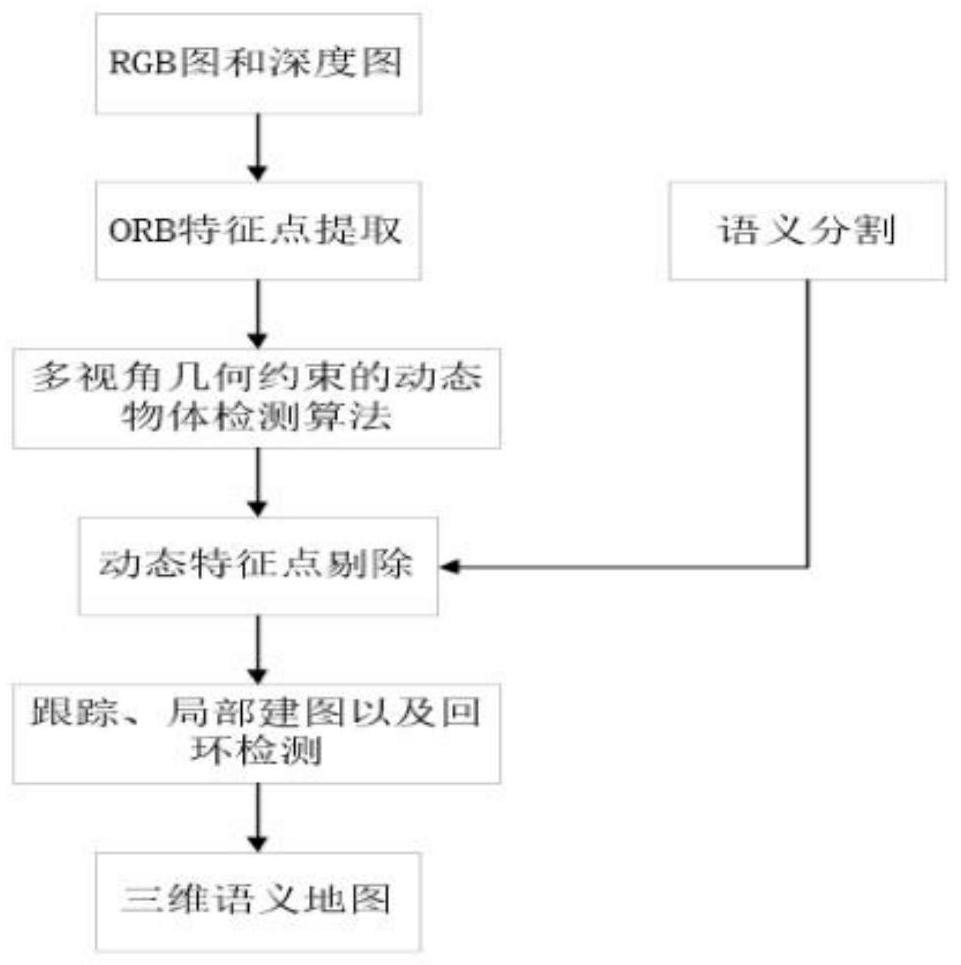
| 专利概述 | 一种基于语义分割动态点的视觉SLAM方法,涉及计算机视觉技术领域。本发明通过RGB‑D相机采集环境图像信息,对所获得的图像进行特征提取和语义分割,得到提取的ORB特征点与语义分割结果;利用基于多视角几何约束的动态物体检测算法,检测出剩余动态物体并剔除动态特征点;顺次执行跟踪、局部建图以及回环检测线程,从而在动态场景下构建出准确的静态场景八叉树三维语义地图,最终实现面向动态场景的基于语义分割动态点的视觉SLAM方法。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










