

| 专利名称 | 一种基于改进蚁群算法的无人机航迹规划方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111031276.2 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-09-03 | 授权日 | 2024-05-17 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 环境模拟|轨迹规划|控制理论|蚁窝|规划算法 | ||
| 应用领域 | 内燃活塞发动机|车辆位置/路线/高度控制|位置/方向控制 | ||
| 意向价格 | 具体面议 | ||
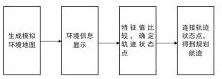
| 专利概述 | 本发明提出使用基于改进蚁群算法的无人机航迹规划算法对无人机运动轨迹进行规划,通过在算法中加入状态参数方程,并设置状态方程的阈值,通过比较求解值与阈值的大小等操作来减少实际运动轨迹长度,达到减少航迹长度的目的。具体步骤如下:首先是生成无人机要执行任务的环境模拟地图;然后是确定无人机执行任务的起始状态点与目标状态点,以及随机生成的障碍物区域;接下来在算法中加入状态参数方程以及阈值;其次进行相应的特征值比较,确定状态点与周围相邻两个状态点之间到目标状态点的轨迹长度值,得到规划的航迹状态点;最后通过连接已确定的航迹轨迹点,得到改进后的无人机航迹线路图。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










