

| 专利名称 | 一种冲击约束的机器人避障和时间最优轨迹规划方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111410601.6 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-11-25 | 授权日 | 2023-09-12 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 工业机器人|路径计划|障碍避免|控制理论|最佳轨迹规划|机器人轨迹|类机器人 | ||
| 应用领域 | 二维的位置/航道控制 | ||
| 意向价格 | 具体面议 | ||
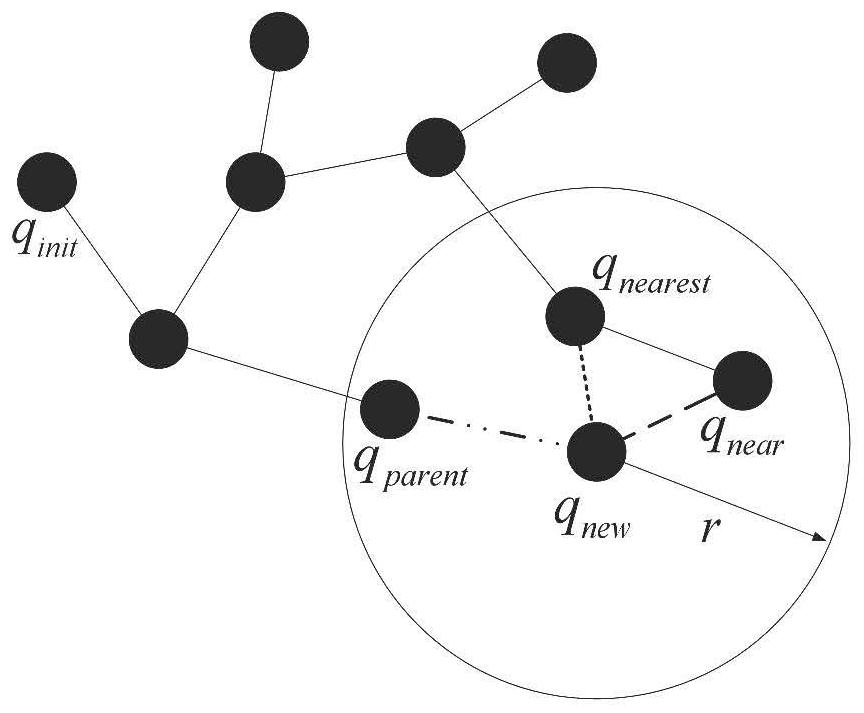
| 专利概述 | 本发明涉及一种工业机器人轨迹规划方法,特别是一种冲击约束的机器人避障和时间最优轨迹规划方法。该轨迹规划系统能够在输入有限参数条件下,自主离线规划出满足速度、加速度及加加速度限制的平滑轨迹。该系统主要包括路径规划模块、样条插值模块、避障处理模块以及时间优化轨迹规划模块。路径规划模块在障碍物斥力场下引入目标偏置和目标偏好思想,样条插值模块采用五次样条插值函数对路径关键节点进行插值平滑,避障处理模块利用几何精细检测方法对工业机器人和障碍物执行避碰处理,其中机器人连杆和焊枪利用胶囊体包络,障碍物利用球体包络,时间优化轨迹模块将等级制度和贪婪策略与传统的鲸鱼优化算法相结合,提高了算法的全局搜索能力。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










