

| 专利名称 | 一种低纹理环境下基于点线特征的视觉SLAM方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202210241165.2 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2022-03-11 | 授权日 | 2024-11-01 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 计算机图形|重投影误差|视觉|基于特征|投影|视觉方法|特征匹配|视觉技术 | ||
| 应用领域 | 图像增强|图像分析|内燃活塞发动机|字符和模式识别 | ||
| 意向价格 | 具体面议 | ||
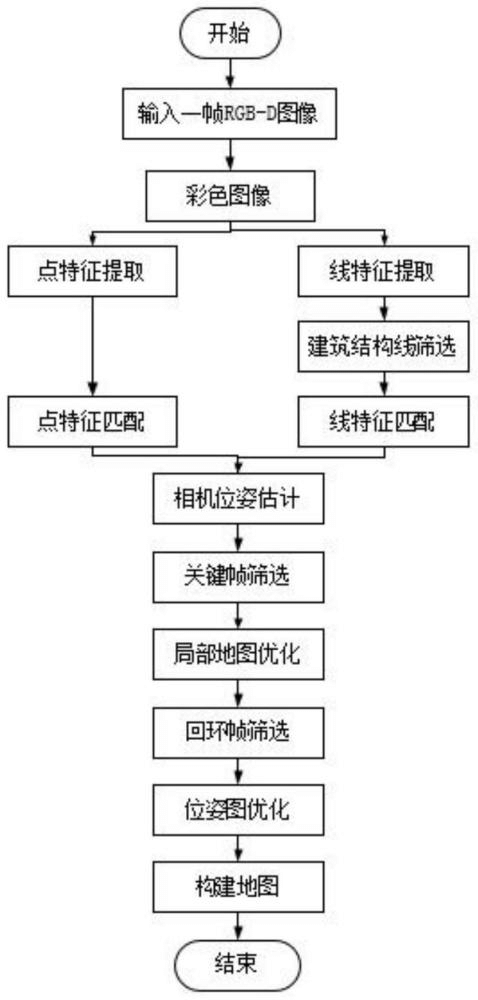
| 专利概述 | 一种低纹理环境下基于点线特征的视觉SLAM方法,涉及计算机视觉技术领域。本发明在ORB‑SLAM2系统上进行扩展,提取图像中的点特征和线特征,在普通的线特征基础上筛选出建筑结构线特征,得到点特征和建筑结构线特征;利用点特征和建筑结构线特征进行特征匹配,使用RANSAC算法剔除误匹配对;根据相邻帧推导出的重投影误差模型估计相机位姿;顺次执行后端优化与回环检测线程,从而提高系统在低纹理场景中的稳定性和鲁棒性,最终实现面向低纹理环境下的基于点线特征的视觉SLAM方法。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










