

| 专利名称 | 一种基于改进YOLOv4的可移动机器人目标检测方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202210496122.9 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2022-05-07 | 授权日 | 2024-10-22 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 训练集|工程学|移动机器人|网络模型|实时采集|测试装置|计算机视觉|目标检测|类机器人|数据集 | ||
| 应用领域 | 字符和模式识别 | ||
| 意向价格 | 具体面议 | ||
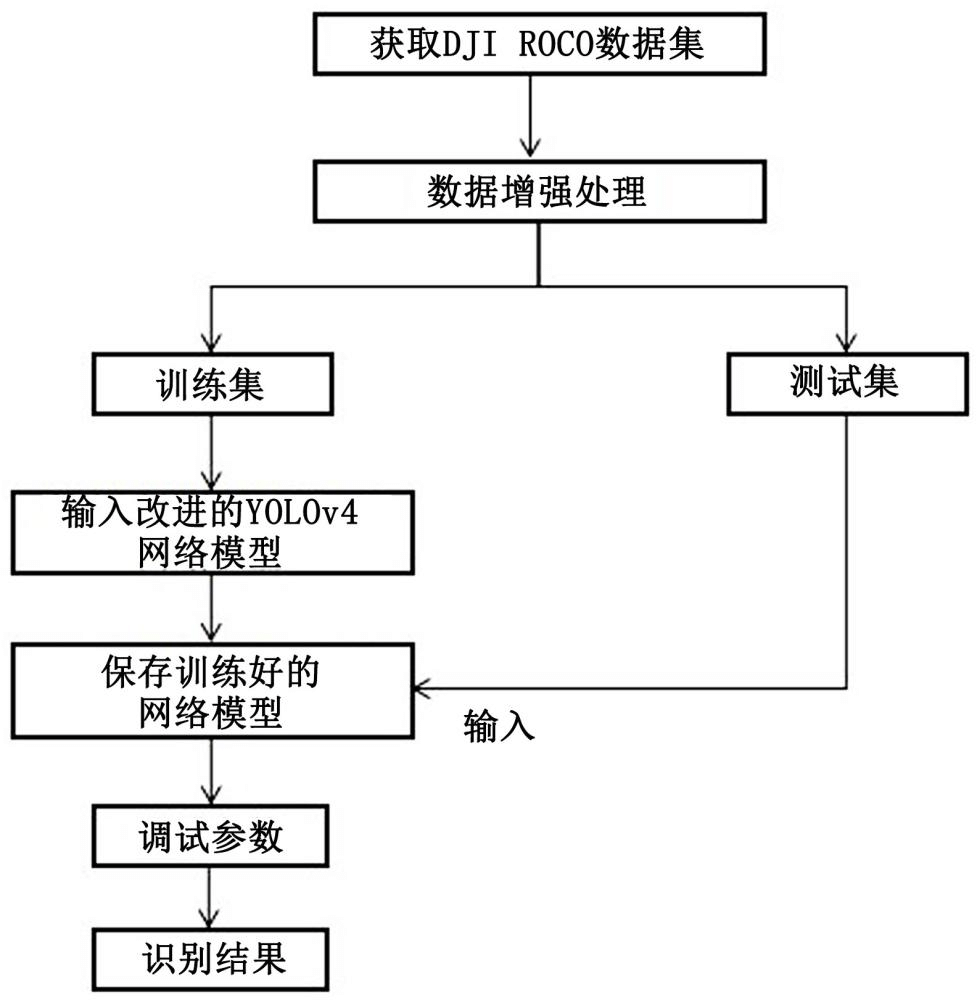
| 专利概述 | 本发明公开了一种基于改进YOLOv4的可移动机器人目标检测方法,其中,目标检测模型包括:(1)获取DJI ROCO数据集,对数据集进行数据增强处理后划分为训练集和测试集;(2)将训练集输入改进的YOLOv4网络模型进行模型训练;(3)将训练后的最佳模型进行量化处理;(4)将测试集输入进量化后的最佳模型中进行测试,即得训练好的可移动机器人目标检测模型。进行目标检测时,实时采集移动中的机器人图片,根据训练后的基于改进YOLOv4的可移动机器人目标检测模型对机器人图片进行机器人目标检测。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










