

| 专利名称 | 一种改进APF-RRT算法的机器人避障路径规划方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202211189700.0 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2022-09-28 | 授权日 | 2024-08-30 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 机器人|路径|路径长度|改进算法|障碍避免|控制理论|算法效率 | ||
| 应用领域 | 程序控制机械手 | ||
| 意向价格 | 具体面议 | ||
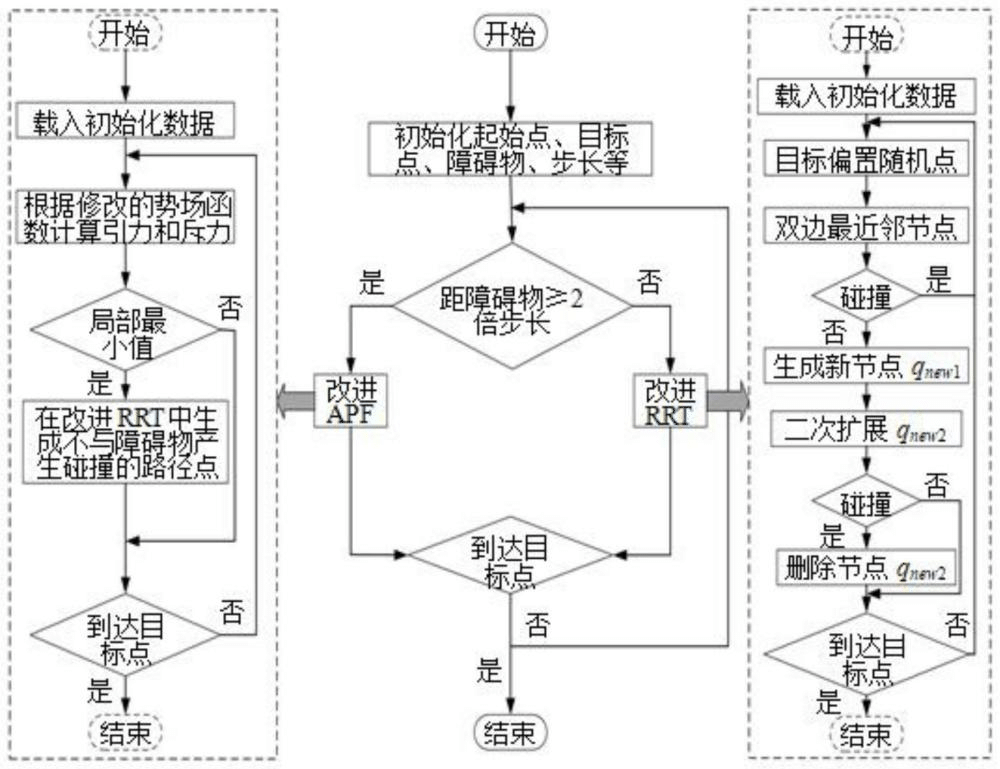
| 专利概述 | 本发明公开了一种改进APF‑RRT算法的机器人避障路径规划方法,在已知起始位置,目标位置和障碍物环境信息的条件下,利用改进APF‑RRT算法,引入障碍物数目参数和算法切换策略避免传统APF算法无法到达目标点和陷入局部最小值,引入双边最近节点选择策略、节点两次拓展策略、圆锥体子集约束采样和目标引导结合的混合采样策略,加快改进RRT算法的收敛效率,采用去除冗余节点和3次非均匀有理B样条曲线平滑策略对避障路径进行裁剪和平滑;提出的改进APF‑RRT算法减少了路径长度,提升了算法效率,可以很好地适用于机器人避障路径规划问题。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










