

| 专利名称 | 一种移动臂关节角度约束的抗噪型神经网络轨迹跟踪控制 | ||
|---|---|---|---|
| 申请号/专利号 | CN202310252380.7 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2023-03-16 | 授权日 | 2025-09-12 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 移动机械手|动态方程|神经网络控制器|人工智能|网络控制|神经网络|仿真|运动学模型 | ||
| 应用领域 | 程序控制机械手|内燃活塞发动机 | ||
| 意向价格 | 具体面议 | ||
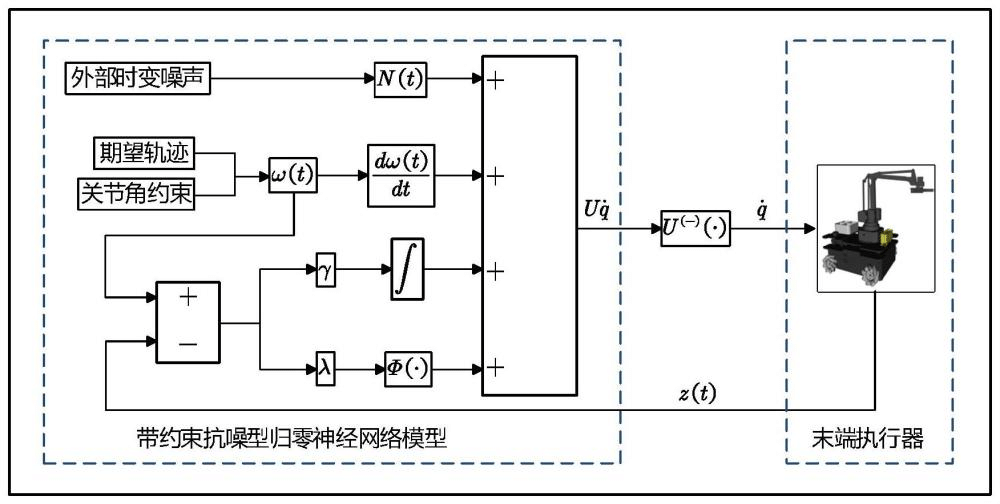
| 专利概述 | 本发明公开了一种移动臂关节角度约束的抗噪型神经网络轨迹跟踪控制方法,涉及移动机器人领域,特别涉及一种基于运动学、关节角度约束及抗噪型归零神经网络的移动机械臂轨迹跟踪控制方法。包括以下步骤:采集移动机械臂车轮、机械臂的初始角度数据以及可活动角度范围;设计移动机械臂跟踪的期望轨迹;基于移动机械臂运动学特性建立整体运动学模型;建立关节角度不等式约束并转化为等式约束;针对轨迹跟踪问题定义了一个向量型误差函数;结合移动机械臂运动学模型、角度约束和抗噪型归零神经网络,构造抗噪型归零神经网络控制器,求解抗噪型归零神经网络动力学方程,解决关节角度约束的移动机械臂在噪声扰动下的轨迹跟踪问题。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










