

| 专利名称 | 一种复杂环境下基于机器学习的运动规划方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202310851954.2 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2023-07-12 | 授权日 | 2023-09-12 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 数据挖掘|多机器人系统|机器|机器人控制|工业工程学|运动规划|工业服务|规划算法 | ||
| 应用领域 | 程序控制机械手|内燃活塞发动机|导航计算工具|生物学模型|机器学习 | ||
| 意向价格 | 具体面议 | ||
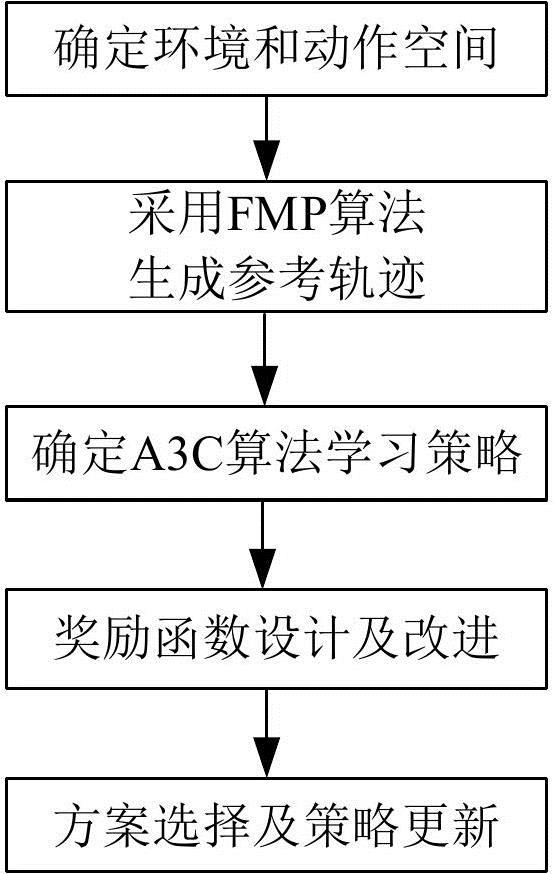
| 专利概述 | 本发明公开一种复杂环境下基于机器学习的运动规划方法,该方法涉及车间运输、机器学习、机器人控制、运动规划等领域。首先设计基于FMP的运动规划算法和基于A3C的运动规划算法,在A3C算法的改进中引入博弈论思想设计奖励函数,然后将改进后的A3C算法与FMP算法进行融合,以此形成三种运动规划策略,在解决多机器人系统在不同环境状态下的运动规划问题时采用不同的运动规划策略,避免算法冗余造成的资源浪费。与其他方法相比,本发明不仅能够提高模型的泛化能力及运动规划效率,还能满足复杂环境下多机器人系统对协同性、安全性和高效性的要求,可以提高多机器人系统的工作效率,可应用于物流业、工业、服务业、农业等领域。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










