

| 专利名称 | 一种边海防车载光电稳定平台目标跟踪方法及系统 | ||
|---|---|---|---|
| 申请号/专利号 | CN202311018578.5 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2023-08-14 | 授权日 | 2024-01-23 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 工程学|控制信号|视轴|伺服控制|控制算法|实时计算|特征提取 | ||
| 应用领域 | 气候变化适应|字符和模式识别|神经架构 | ||
| 意向价格 | 具体面议 | ||
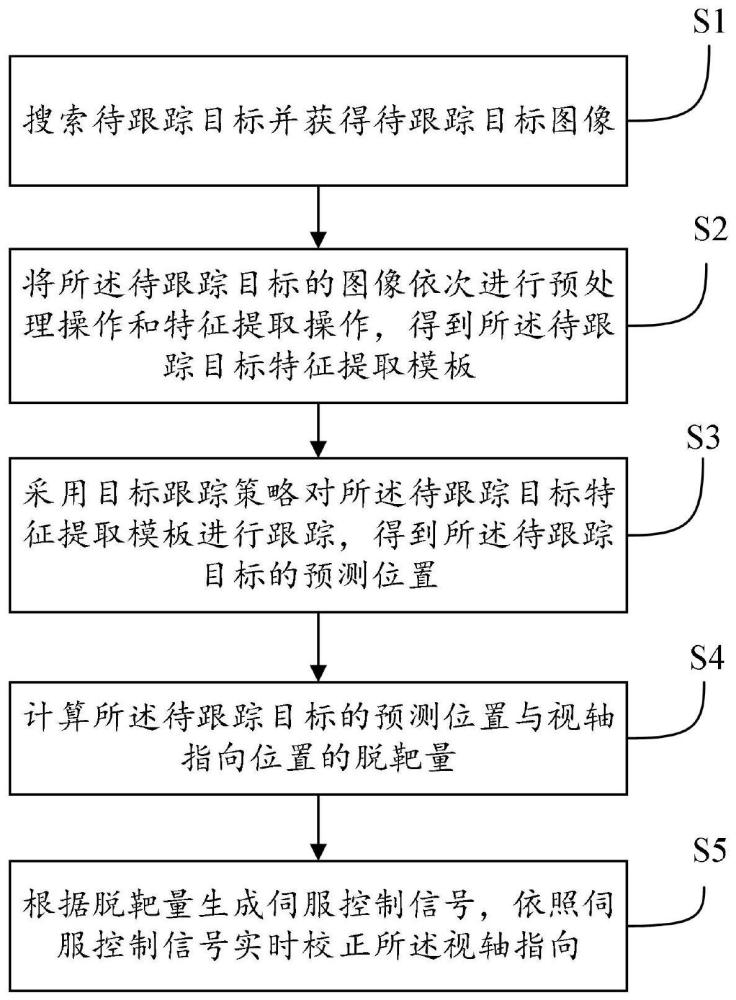
| 专利概述 | 本发明提供了一种边海防车载光电稳定平台目标跟踪方法及系统,属于光电稳定平台跟踪技术领域。首先搜索待跟踪目标并获得待跟踪目标图像;其次将待跟踪目标的图像依次进行预处理操作和特征提取操作,得到待跟踪目标特征提取模板;再采用目标跟踪策略对待跟踪目标特征提取模板进行跟踪,得到待跟踪目标的预测位置;然后计算待跟踪目标的预测位置与视轴指向位置的脱靶量;最后根据脱靶量生成伺服控制信号,依照伺服控制信号实时校正视轴指向。本发明利用目标跟踪算法获得运动目标的当前位置以计算出脱靶量,采用伺服控制算法对电机进行伺服控制,以驱动载荷实时校正视轴指向能够跟踪目标的位置,实现光电稳定平台的目标精准跟踪。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










