| 专利名称 |
一种基于图优化的多传感器融合定位与建图方法 |
| 申请号/专利号 |
CN202311068502.3 |
专利权人(第一权利人) |
长春工业大学 |
| 申请日 |
2023-08-24 |
授权日 |
2023-12-19 |
| 专利类别 |
授权发明 |
战略新兴产业分类 |
新一代信息技术 |
| 技术主题 |
工程学|里程表|图优化|姿势|激光雷达|源数据|观察数据|最小二乘法|机器人|惯性测量单元|机器人感知|非线性|算法|多传感器 |
| 应用领域 |
导航计算工具|内燃活塞发动机|通过速度/加速度测量进行导航|卫星无线电信标定位系统|电磁波的再辐射|复杂数学运算|测量距离 |
| 意向价格 |
具体面议 |
| 专利概述 |
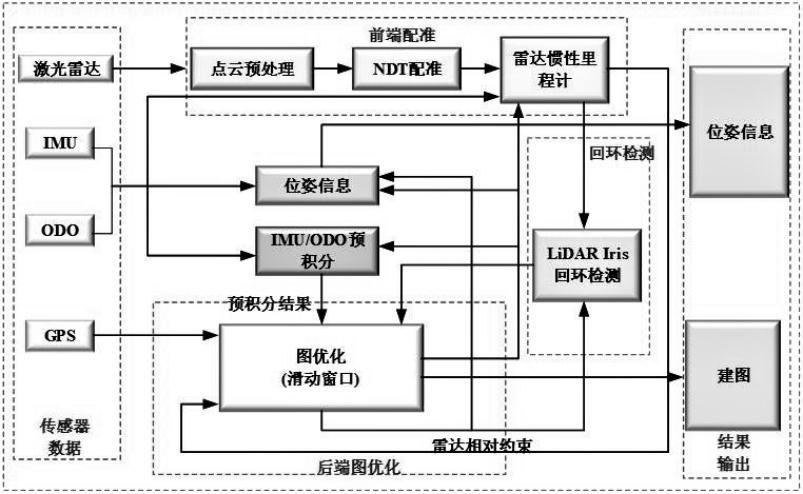
本发明公开了一种基于图优化的多传感器融合定位与建图方法,涉及机器人感知领域。首先该方法建立在图优化的基础上,基于滑动窗口实现激光雷达、惯性测量单元(IMU)、轮速里程计(ODO)及GPS的多源数据联合非线性优化。首先通过IMU与ODO采集的信息构建联合预积分模型,基于预积分模型修正激光雷达观测数据与重复积分的耗时问题;其次构建4种类型不同的传感器的残差项与约束方程;最后图优化的方式建立非线性最小二乘目标函数式联合优化关键帧与子地图的位姿。本发明应用于同步定位与地图构建,与现有技术相比,本发明具有良好的建图精度和鲁棒性,能够实现更高精度的定位与建图效果,完成更高精度的全局位姿图优化。 |
| 图片资料 |
|
| 合作方式 |
具体面议 |
| 联系人 |
戚梅宇 |
联系电话 |
13074363281 |












