

| 专利名称 | 一种基于Dueling DQN算法的多AGV负载均衡与任务调度方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202311805708.X | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2023-12-26 | 授权日 | 2024-04-26 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 神经网络结构|网络结构|路径长度|人工智能|道路网|运筹学|神经网络|算法优化|决策模型|物流 | ||
| 应用领域 | 基于特定数学模式|预测|神经学习方法 | ||
| 意向价格 | 具体面议 | ||
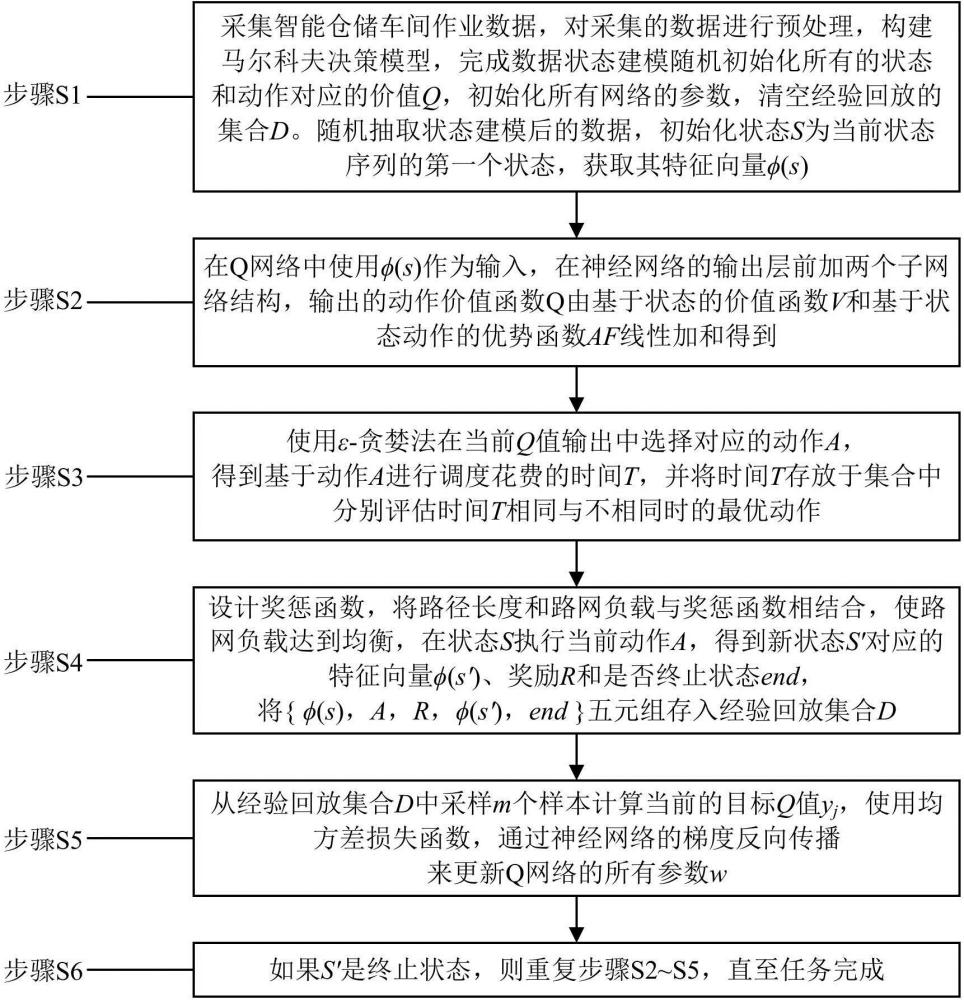
| 专利概述 | 本发明提出一种基于Dueling DQN算法的多AGV负载均衡与任务调度方法,涉及智能车间的仓储物流自动配送领域。在车间收集生产作业数据,以数据为基础建立马尔科夫决策模型。设定训练数据样本,用Dueling DQN算法优化数据的神经网络结构,输出层动作价值函数Q为价值函数和优势函数的线性加和,将价值函数和优势函数分开建模,使智能体更好的处理与动作关联较小的状态。构建奖惩函数与路网负载的联系,将路径长度和路网负载融入奖惩函数。构建关注状态价值和动作优势值差异的任务调度匹配执行机制,可以应用于仓储车间的AGV任务调度领域。与现有技术相比,本发明可高效优化路网负载,准确匹配不同状态和动作调度策略,极大提高了生产效率。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










