

| 专利名称 | 一种融合全局寻优与安全防护的智能驾驶优化控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202410914038.3 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2024-07-09 | 授权日 | 2024-12-13 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 控制工程|控制理论|可靠性工程|强化学习|全局优化|动作控制 | ||
| 应用领域 | 内燃活塞发动机|生物学模型|控制装置 | ||
| 意向价格 | 具体面议 | ||
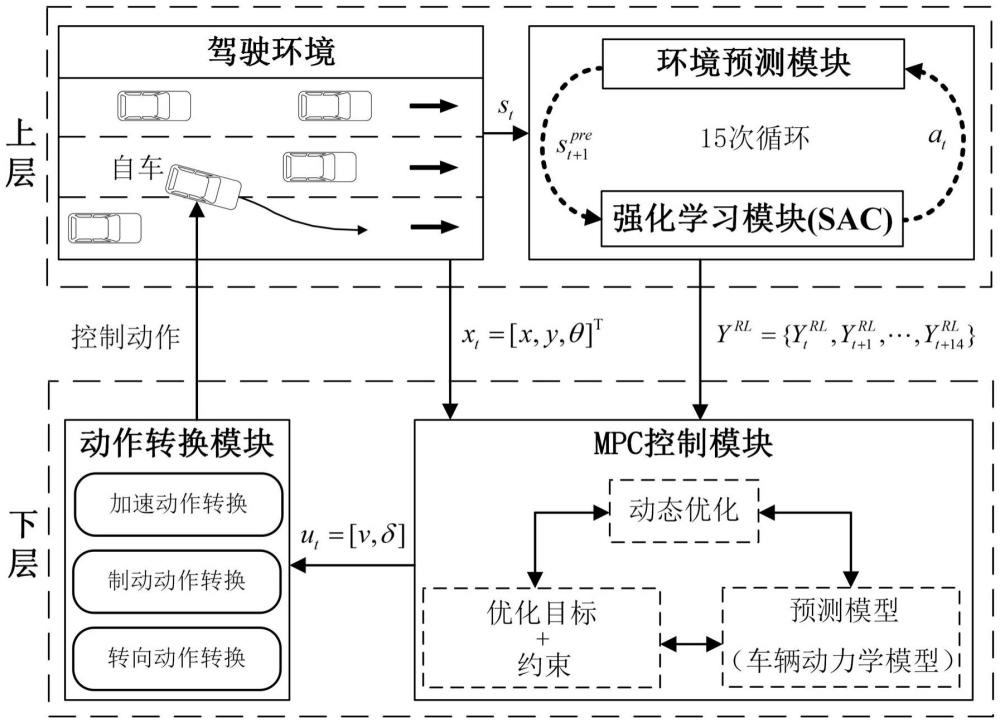
| 专利概述 | 一种融合全局寻优与安全防护的智能驾驶优化控制方法,为解决当前智能驾驶控制策略存在易陷入局部最优以及泛化能力较差等问题。本发明涉及智能驾驶领域。本发明包括上下两层,上层通过强化学习全局寻优确定航向角和速度参考序列并输入给下层,下层通过优化求解确定控制动作,控制车辆实现智能驾驶。其中,上层包括驾驶环境、强化学习模块、环境预测模块,下层包括MPC控制模块和动作转换模块。上层的强化学习模块通过与驾驶环境交互展开训练;训练完成后的强化学习模块通过与环境预测模块的交互获取航向角和速度参考序列;下层的MPC控制模块与动作转换模块利用上层提供的航向角和速度参考序列优化出最优控制动作,控制车辆实现智能驾驶。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










