

| 专利名称 | 智能视觉引导的汽车避障控制优化方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202411245094.9 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2024-09-06 | 授权日 | 2025-01-21 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 人工智能|特征融合|障碍避免|控制理论|路径追踪|实时计算|目标检测|智能车 | ||
| 应用领域 | 内燃活塞发动机|生物学模型|场景识别|控制装置 | ||
| 意向价格 | 具体面议 | ||
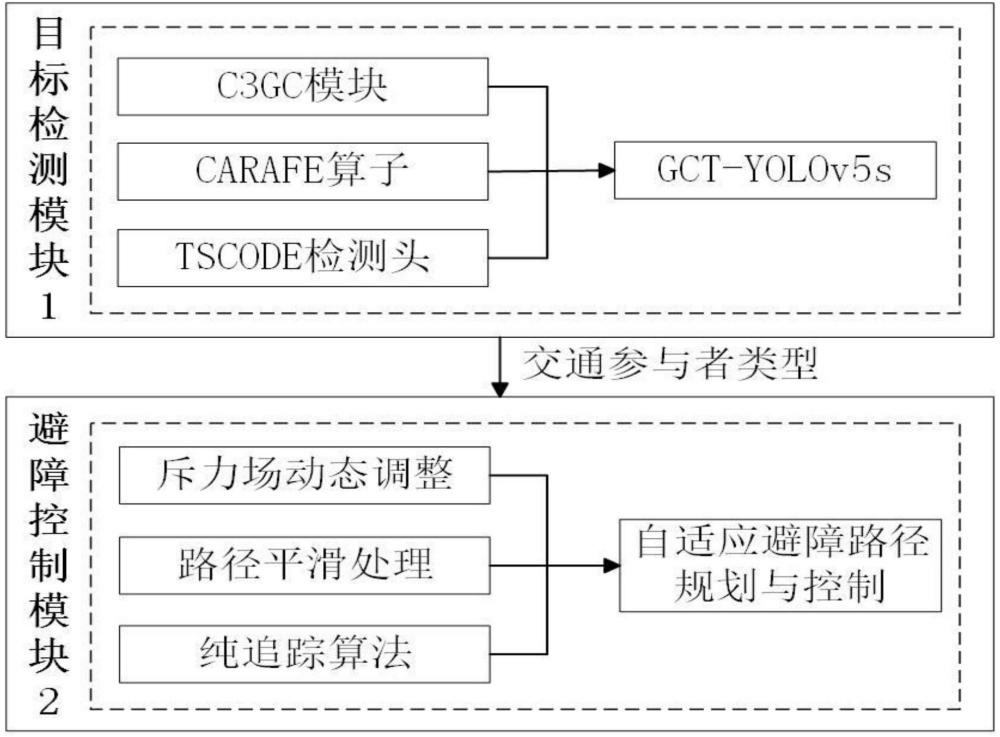
| 专利概述 | 智能视觉引导的汽车避障控制优化方法,属于自动驾驶领域,其特征在于,包括目标检测模块和避障控制模块;其中,所述目标检测模块包括GCT‑YOLOv5s,通过C3GC模块提取关键特征,利用CARAFE算子增强特征融合,经TSCODE检测头确定分类和定位之间的关系,实现行驶场景中交通参与者类型的检测;所述避障控制模块包括自适应避障路径规划与控制,结合交通参与者类型进行斥力场动态调整,并进行路径平滑处理,采用纯追踪算法进行路径跟踪控制,实现智能汽车的自适应避障路径规划与控制。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










