

| 专利名称 | 一种多模块化机器人最优协调控制方法、设备及介质 | ||
|---|---|---|---|
| 申请号/专利号 | CN202411707310.7 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2024-11-27 | 授权日 | 2025-10-10 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 动态模型|绩效指标|最优控制|机器人控制|神经网络|运动学模型|协调控制|类机器人 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
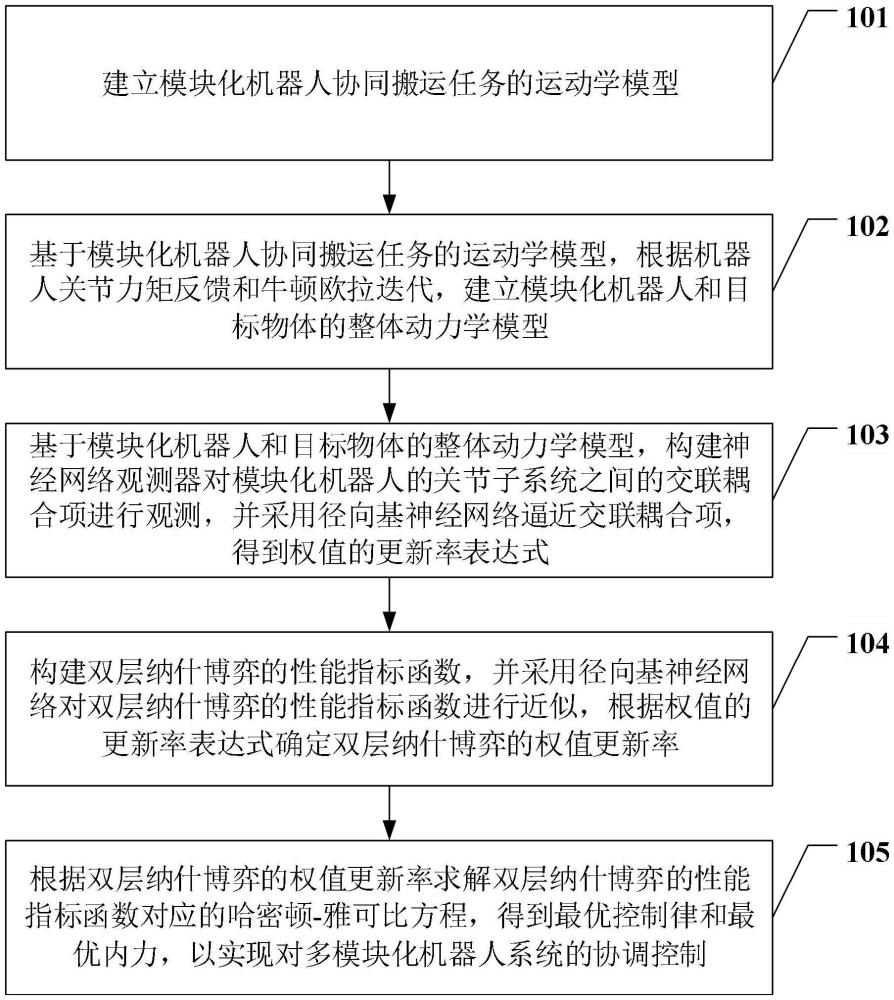
| 专利概述 | 本申请公开了一种多模块化机器人最优协调控制方法、设备及介质,涉及机器人控制领域,首先建立模块化机器人协同搬运任务的运动学模型,其次通过机器人关节力矩反馈和牛顿欧拉迭代相结合,建立模块化机器人和目标物体的整体动力学模型,并通过神经网络观测器完成对模块化机器人的关节子系统之间的交联耦合项的观测,随后分别构建内层和外层的性能指标函数,然后使用径向基神经网络分别对内层和外层的性能指标函数进行近似,求解哈密顿‑雅可比方程得到最优控制律和最优内力,实现对多模块化机器人系统的协调控制。本申请在兼顾模块化机器人内部协作问题的同时,优化多个模块化机器人间的交互策略,从而保证系统的准确性、最优性及稳定性。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










