

| 专利名称 | 一种基于SAC的汽车自适应巡航控制优化方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202411768854.4 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2024-12-04 | 授权日 | 2025-05-27 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 自适应巡航|SAC算法|汽车控制|优化方法|自动驾驶|车辆工程|控制策略 | ||
| 应用领域 | 内燃活塞发动机 | ||
| 意向价格 | 具体面议 | ||
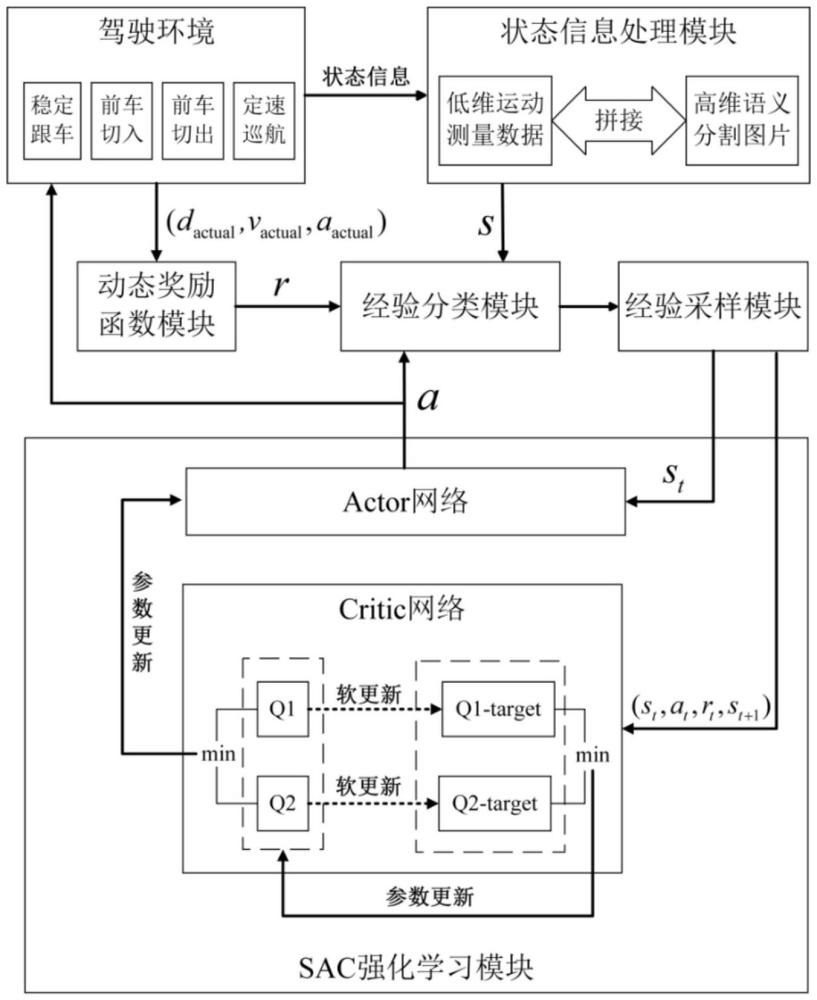
| 专利概述 | 一种基于SAC的汽车自适应巡航控制优化方法,属于自动驾驶领域,其特征在于,该方法包括以下模块:驾驶环境、状态信息处理模块、SAC强化学习模块、动态奖励函数模块、经验分类模块和经验采样模块。首先,从驾驶环境中获取两个维度的融合信息,得到当前状态,然后,SAC强化学习模块基于当前状态决策控制动作并应用于驾驶环境,更新环境并获取下一时刻的状态。其中,动态奖励函数模块根据动作效果和重要性差异计算奖励值;经验分类模块根据驾驶环境对经验样本进行分区域存储;经验采样模块采用固定经验采样和局部优先经验回放方法,对样本进行采样,用于训练SAC强化学习模块,并决策出最优控制动作,实现自适应巡航控制。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










