

| 专利名称 | 一种融合强化学习自适应预瞄的路径跟踪控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202411975861.1 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2024-12-31 | 授权日 | 2025-03-21 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 路径跟踪|强化学习|自适应预瞄|控制方法|自动驾驶|卫星应用|运动控制 | ||
| 应用领域 | 内燃活塞发动机|车辆位置/路线/高度控制|位置/方向控制 | ||
| 意向价格 | 具体面议 | ||
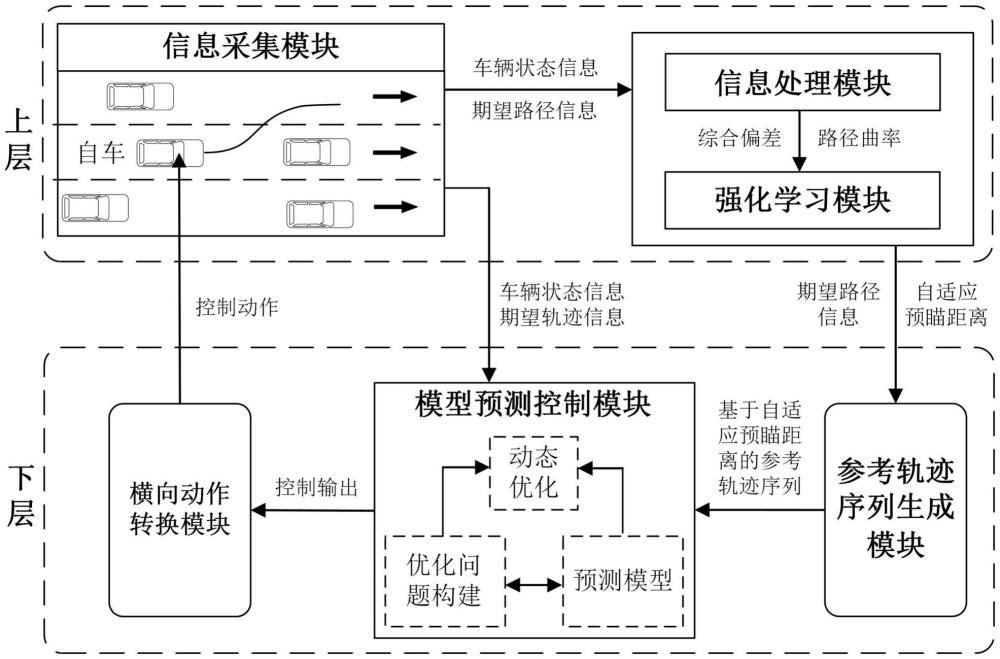
| 专利概述 | 一种融合强化学习自适应预瞄的路径跟踪控制方法,以应对动态环境的变化并解决复杂的多目标路径跟踪问题。本发明涉及智能驾驶领域。本发明包括上下两层,上层通过强化学习确定自适应预瞄距离并输入给下层,下层通过优化求解确定控制动作,控制车辆实现智能路径跟踪。其中,上层包括信息采集模块、信息处理模块、强化学习模块,下层包括参考轨迹序列生成模块、模型预测控制模块和横向动作转换模块。上层强化学习模块通过与驾驶环境交互优化自适应预瞄距离;下层参考轨迹序列生成模块输出基于自适应预瞄距离的参考轨迹序列输入到模型预测控制模块获得控制输出,通过横向动作转换模块将控制输出转换为控制动作,控制车辆实现智能路径跟踪。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










