

| 专利名称 | 一种融合经验价值动态评估的强化学习避撞控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202510031632.2 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-01-09 | 授权日 | 2025-06-06 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 样本分类|风险评估|工业工程学|强化学习|仿真|实时计算 | ||
| 应用领域 | 内燃活塞发动机|防撞系统|生物学模型|设计优化/仿真|特殊数据处理应用|控制装置 | ||
| 意向价格 | 具体面议 | ||
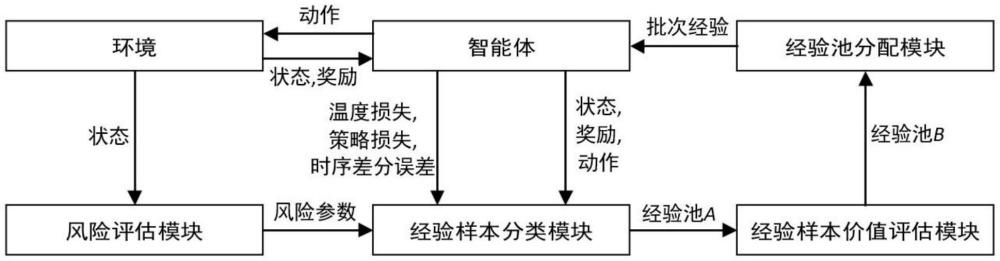
| 专利概述 | 一种融合经验价值动态评估的强化学习避撞控制方法,为解决当前智能驾驶控制策略样本利用率差的等问题。本发明涉及智能驾驶领域。本发明包括风险评估模块、经验样本分类模块、经验样本价值评估模块和经验池分配模块。其中,风险评估模块实时评估每个环境步的风险参数,经验样本分类模块根据风险参数将经验样本分类储存在安全、待观察和危险三个经验池中,经验价值评估模块实时动态评估经验样本的价值,并将三个经验池中的经验样本分别进行排序,经验池分配模块实时动态评估三个经验池的价值,确定三个经验池的抽取比例,传至智能体进行经验回放,更新安全通行策略,重复上述过程,直至获得最优的安全通行策略。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










