| 专利名称 |
一种基于风险边界的大型散料装备路径规划方法 |
| 申请号/专利号 |
CN202510267413.4 |
专利权人(第一权利人) |
长春工业大学 |
| 申请日 |
2025-03-07 |
授权日 |
2025-08-26 |
| 专利类别 |
授权发明 |
战略新兴产业分类 |
新一代信息技术 |
| 技术主题 |
碰撞风险|无人机|路径|点云|风险|运筹学|工业工程学|神经网络|环境监测|决策策略 |
| 应用领域 |
生物学模型|制造计算系统|基于知识的模式的计算机系统 |
| 意向价格 |
具体面议 |
| 专利概述 |
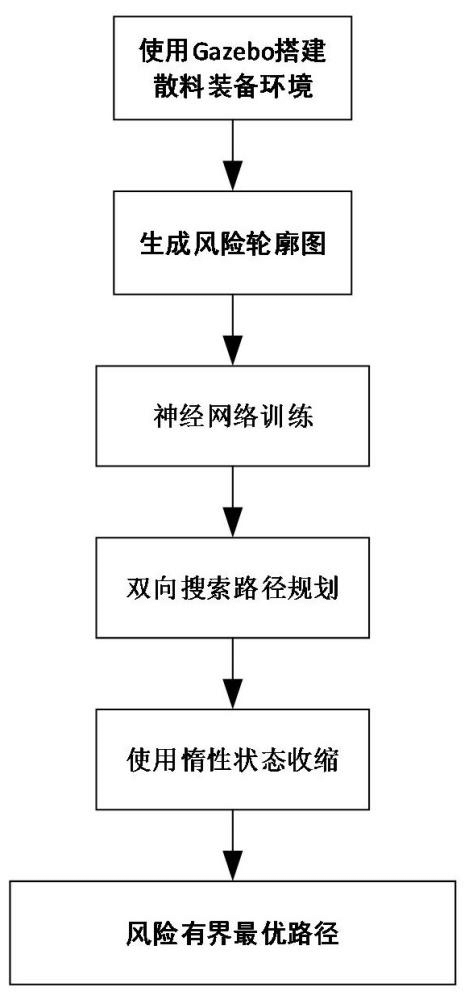
本发明公开了一种基于风险边界的大型散料装备路径规划方法,该方法涉及机器学习、路径规划等领域。首先,利用确定性点云点云获取环境中的障碍物,计算出在给定风险容忍度下安全区域的边界,来定义障碍物的风险边界,通过专家演示学习决策策略训练神经网络采样器。随后,构建神经成本估计器以从样本中选择最佳信息状态,使用神经网络递归地向起点和目标双向推进,再基于平方和优化验证中间连接的碰撞风险。与其他方法相比,本发明不仅可以应用于大型散料装备的路径规划,还可以扩展到其他领域和场景,例如无人驾驶车辆、无人机导航、环境监测等。 |
| 图片资料 |
|
| 合作方式 |
具体面议 |
| 联系人 |
戚梅宇 |
联系电话 |
13074363281 |












