

| 专利名称 | 一种基于无信号路口自动驾驶系统的隐式状态表示方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202510279839.1 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-03-11 | 授权日 | 2025-06-17 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 状态空间|道路状况|强化学习|仿真|实时计算 | ||
| 应用领域 | 生物学模型 | ||
| 意向价格 | 具体面议 | ||
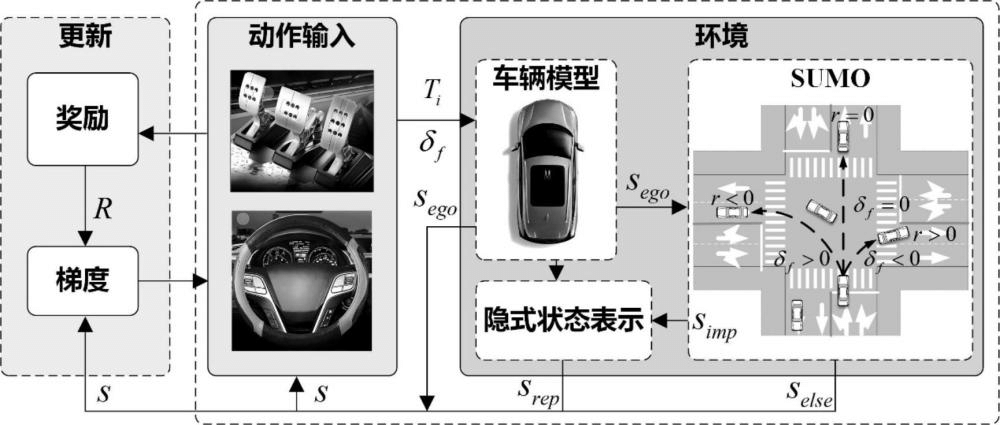
| 专利概述 | 本发明涉及一种基于无信号路口自动驾驶系统的隐式状态表示方法,旨在简化状态空间表示,提升系统训练效率和鲁棒性。该方法通过引入车道保持标志和目标速度作为隐式状态变量,表示与自车无关的环境信息,从而减少了状态空间维度,避免了考虑过多周围交通参与者和复杂环境信息带来的计算复杂性。在无周围交通参与者的情况下,目标速度依据交通规则和道路条件设定,而在有周围交通参与者时,目标速度根据与周围车辆的相对位置和速度进行动态调整。车道保持标志则根据自车当前位置和道路信息判断是否需要变道或保持车道。该方法有效简化了状态空间,提高了强化学习训练效率,能够更好地应对无信号路口等复杂环境中的自动驾驶任务。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










