| 专利名称 |
一种易退化环境下基于机器学习的路径规划方法 |
| 申请号/专利号 |
CN202510330342.8 |
专利权人(第一权利人) |
长春工业大学 |
| 申请日 |
2025-03-20 |
授权日 |
2025-06-06 |
| 专利类别 |
授权发明 |
战略新兴产业分类 |
新一代信息技术 |
| 技术主题 |
路径生成|路径|移动机器人|点云|先验信息|数据挖掘|风险|运输业|工业工程学|可伸缩性|算法优化|语义图 |
| 应用领域 |
导航计算工具|预测|字符和模式识别|机器学习|电磁波的再辐射 |
| 意向价格 |
具体面议 |
| 专利概述 |
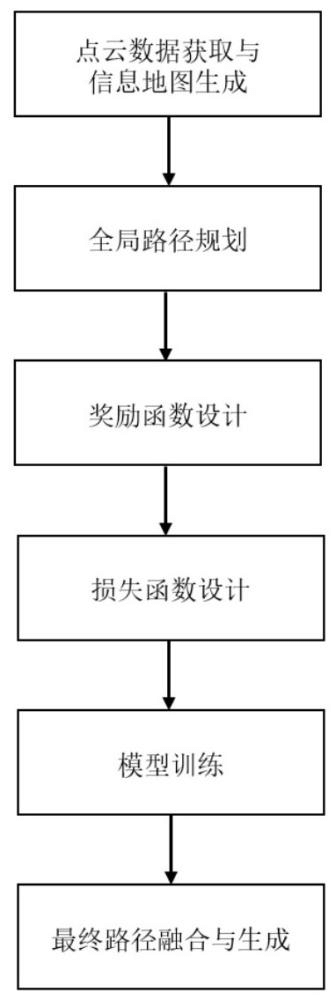
本发明提出一种易退化环境下基于机器学习的路径规划方法,涉及路径规划、机器学习等领域。具体步骤包括:首先通过语义分割和模糊评价对点云数据进行处理生成包含风险信息的语义地图,接着以A*算法生成的全局路径为DQN算法的先验信息,随后设计综合考虑安全、效率和路径最短的奖励函数,通过DQN算法优化局部决策。最终融合DQN生成的局部路径与全局路径,生成连续、平滑且安全的最优路径。与现有方法相比,本发明不仅能够有效应对激光雷达在退化环境中的性能下降问题,还能显著提高移动机器人在复杂环境中的路径规划安全性和鲁棒性,具有实时性和扩展性,可广泛应用于服务业、工业和运输业等领域。 |
| 图片资料 |
|
| 合作方式 |
具体面议 |
| 联系人 |
戚梅宇 |
联系电话 |
13074363281 |












