| 专利名称 |
一种基于深度学习的大型散料装备运动控制优化方法 |
| 申请号/专利号 |
CN202510732837.3 |
专利权人(第一权利人) |
长春工业大学 |
| 申请日 |
2025-06-04 |
授权日 |
2025-08-19 |
| 专利类别 |
授权发明 |
战略新兴产业分类 |
新一代信息技术 |
| 技术主题 |
可控性|网络体系结构|计算模型|智能控制|鲁棒性|工业工程学|系统工程|智能制造|控制系统|计算机科学|深度学习|过程工程|自动化|自动化技术|动作控制|散装货物|物流 |
| 应用领域 |
生物学模型|设计优化/仿真|基于约束的CAD|3D建模 |
| 意向价格 |
具体面议 |
| 专利概述 |
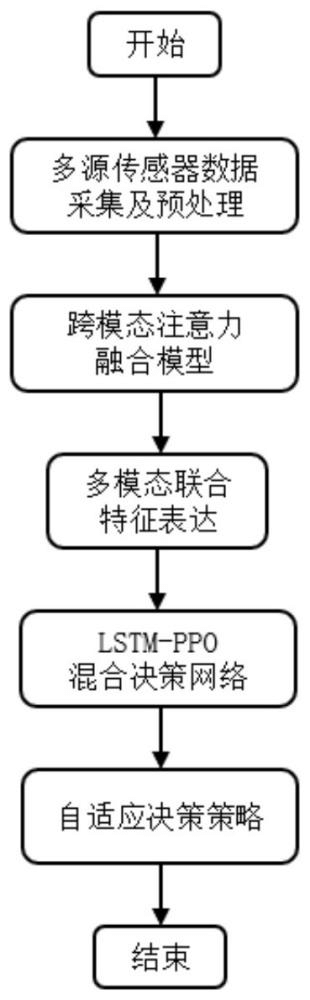
本发明公开一种基于深度学习的大型散料装备运动控制优化方法,涉及基于特定计算模型的计算机系统、深度学习、智能控制及工业自动化领域。针对散料装备控制系统中存在的环境感知不全面、动态环境适应性差等问题,本方法首先通过多源传感器采集数据及预处理;其次,构建跨模态注意力融合模型实现特征对齐;最后,设计LSTM‑PPO混合网络架构,其中LSTM层处理时序状态特征,PPO算法实现控制策略优化。与现有技术相比,本发明可以提升传统大型散料装备运动控制中精度与可控性,更易提高系统运行效率与鲁棒性,本方法可广泛应用于物流与散货装卸、工业智能制造和生产领域。 |
| 图片资料 |
|
| 合作方式 |
具体面议 |
| 联系人 |
戚梅宇 |
联系电话 |
13074363281 |












