

| 专利名称 | 一种多模态感知与DRL-MPC融合的车辆换道控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202510740280.8 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-06-05 | 授权日 | 2025-09-05 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 人工智能|控制理论|转弯角|仿真 | ||
| 应用领域 | 驾驶员输入参数 | ||
| 意向价格 | 具体面议 | ||
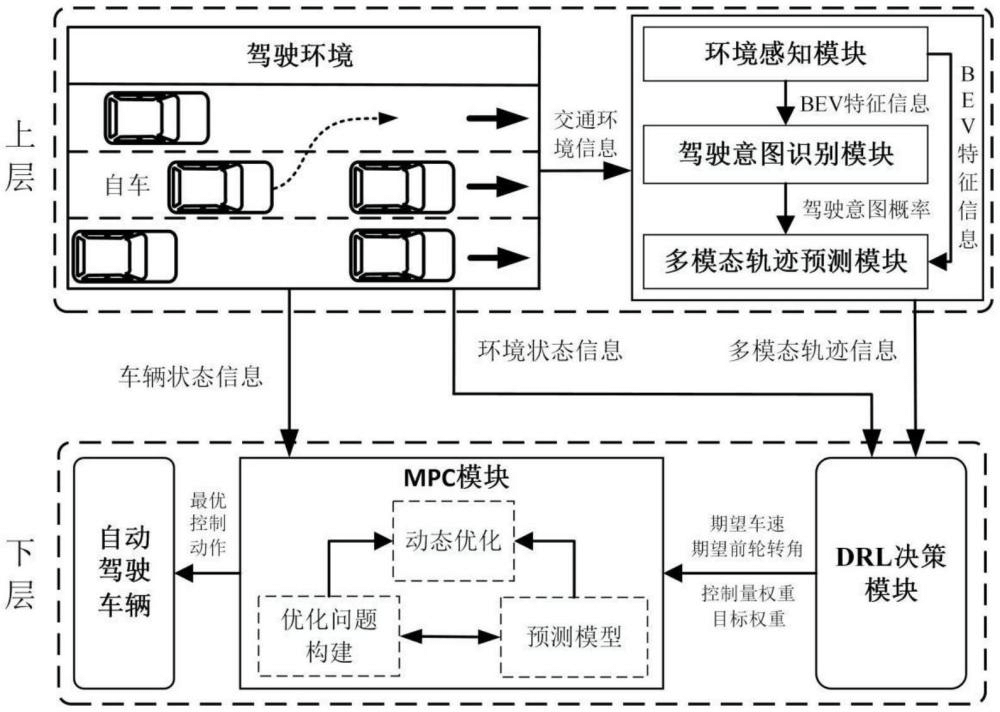
| 专利概述 | 一种多模态感知与DRL‑MPC融合的车辆换道控制方法,用以保障复杂交通环境下车辆换道行驶的安全性。本发明涉及智能驾驶领域。本发明包括上下两层,上层包括环境感知模块、驾驶意图识别模块、多模态轨迹预测模块,下层包括DRL决策模块和MPC模块。上层利用环境感知模块从驾驶环境中提取交通环境信息生成BEV特征信息,驾驶意图识别模块根据BEV特征信息生成驾驶意图概率,多模态轨迹预测模块根据BEV特征信息和驾驶意图概率生成多模态轨迹信息;下层DRL决策模块根据环境状态信息和多模态轨迹信息生成期望车速、期望前轮转角、目标权重以及控制量权重,最后由MPC模块求解确定最优控制动作,实现自动驾驶车辆的换道控制。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










