

| 专利名称 | 一种基于DRL的无信号交叉口端到端车辆运动控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202510765068.7 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-06-10 | 授权日 | 2025-10-10 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 人工智能|行车安全|运动控制|交通流量|车辆控制|实时计算|动作控制|自动驾驶 | ||
| 应用领域 | 程序控制|计算机控制|模拟器 | ||
| 意向价格 | 具体面议 | ||
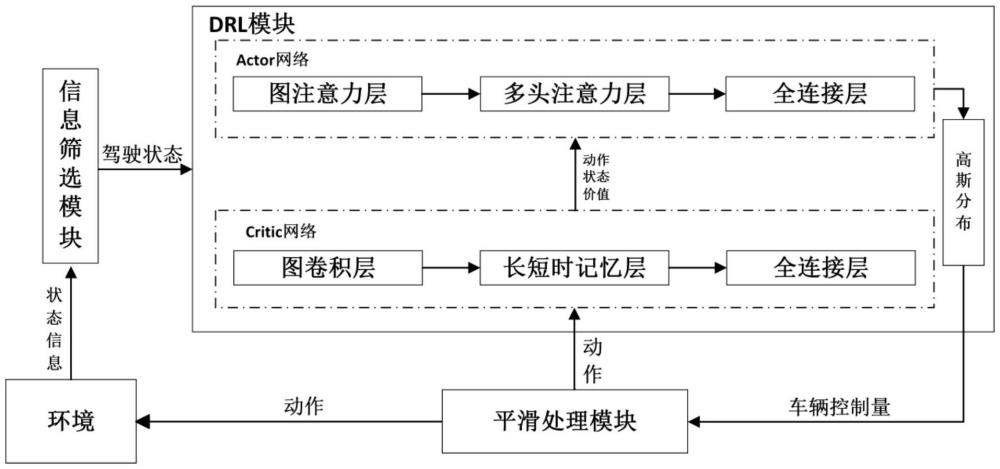
| 专利概述 | 一种基于DRL的无信号交叉口端到端车辆运动控制方法,以应对在无信号交叉口高度动态随机的交通流,提高车辆的行驶安全性。本发明涉及智能驾驶领域,包括信息筛选模块、DRL模块和平滑处理模块。信息筛选模块从环境中获取状态信息并提炼为低维环境信息和时空交互状态,构成状态空间并输出驾驶状态。DRL模块中的Actor网络和Critic网络分别提取驾驶状态中的空间交互特征和时间特征,并与低维环境信息特征进行拼接。Actor网络将拼接后的状态特征经过高斯分布重参数化采样输出车辆控制量。平滑处理模块对车辆控制量进行平滑处理,并将动作传递给环境中的自动驾驶车辆进行运动控制,同时更新环境的状态信息。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










