

| 专利名称 | 一种基于GM鲁棒核函数的自适应点云配准方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202510866853.1 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-06-26 | 授权日 | 2025-12-23 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 机器人|计算物理学|点云处理|自适应|遥感|算法|机器人运动学 | ||
| 应用领域 | 图像增强|图像分析|图形图像转换|涉及图像拼接的细节 | ||
| 意向价格 | 具体面议 | ||
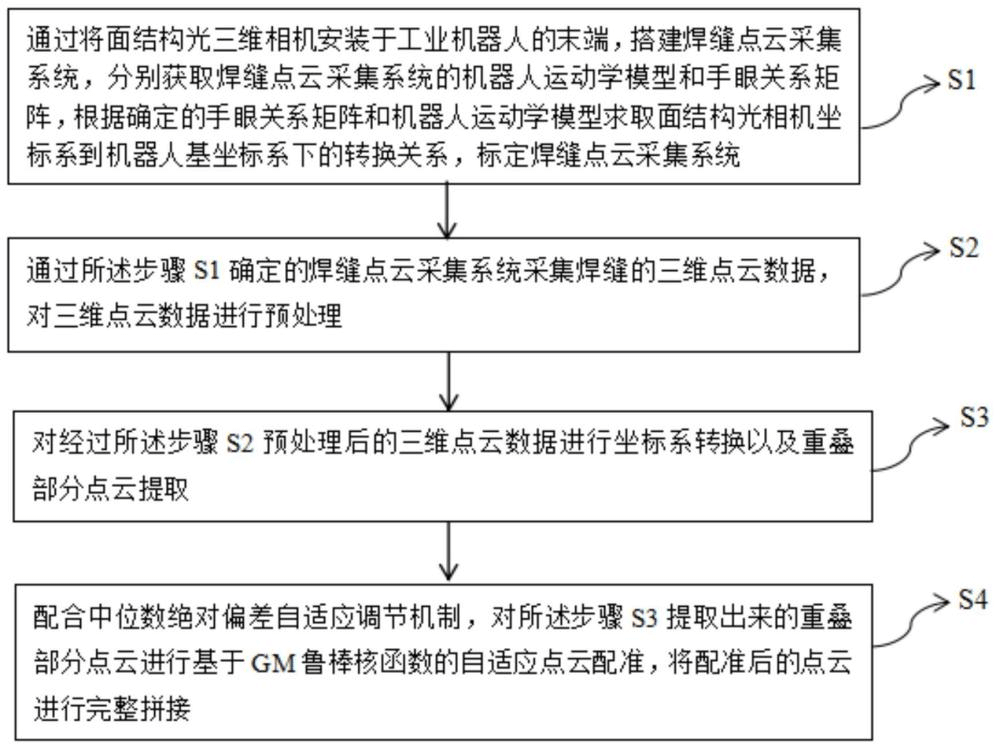
| 专利概述 | 本发明涉及三维点云处理技术领域,尤其涉及一种基于GM鲁棒核函数的自适应点云配准方法。该方法包括:搭建焊缝点云采集系统,分别获取焊缝点云采集系统的机器人运动学模型和手眼关系矩阵,根据确定的手眼关系矩阵和机器人运动学模型标定焊缝点云采集系统;通过焊缝点云采集系统采集焊缝的三维点云数据,对三维点云数据进行预处理;对预处理后的三维点云数据进行坐标系转换以及重叠部分点云提取;配合中位数绝对偏差自适应调节机制,对提取出来的重叠部分点云进行基于GM鲁棒核函数的自适应点云配准,将配准后的点云进行完整拼接。本发明提供的方法,有效抑制了现有配准算法中异常值对配准误差的干扰,显著提高了算法的精度和稳定性。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










