

| 专利名称 | 强化学习与博弈论融合的人机动态协同转向控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202511087884.3 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-08-05 | 授权日 | 2025-10-10 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 人机|转向控制|车辆动力学|驾驶员|路径追踪|强化学习|重量分布|转向角 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
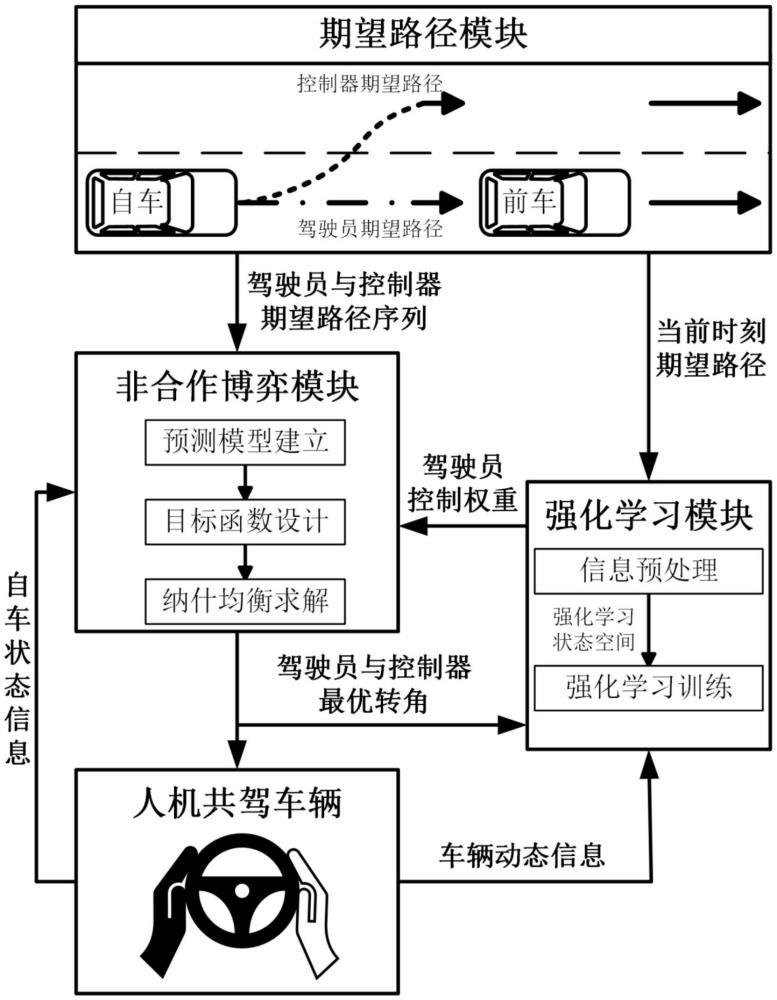
| 专利概述 | 强化学习与博弈论融合的人机动态协同转向控制方法,旨在优化驾驶员与控制器的动态权重分配,以保障人机共驾车辆行驶的安全性与路径跟踪精度。本发明涉及智能驾驶领域。本发明包括期望路径模块、强化学习模块、非合作博弈模块和人机共驾车辆四个模块。期望路径模块用于生成驾驶员与控制器期望路径序列以及当前时刻期望路径;强化学习模块接收当前时刻期望路径、车辆动态信息、驾驶员与控制器最优转角,训练生成驾驶员控制权重;非合作博弈模块结合驾驶员控制权重、驾驶员与控制器期望路径序列和自车状态信息,通过非合作博弈优化出驾驶员与控制器最优转角,实现对人机共驾车辆的协同转向控制。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










