

| 专利名称 | 基于双网络迭代优化的智能汽车路径跟踪控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202511197137.5 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-08-26 | 授权日 | 2025-11-07 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 模型预测控制|网络模块|可靠性工程|编码器|路径追踪|迭代优化|工业工程学|自动驾驶 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
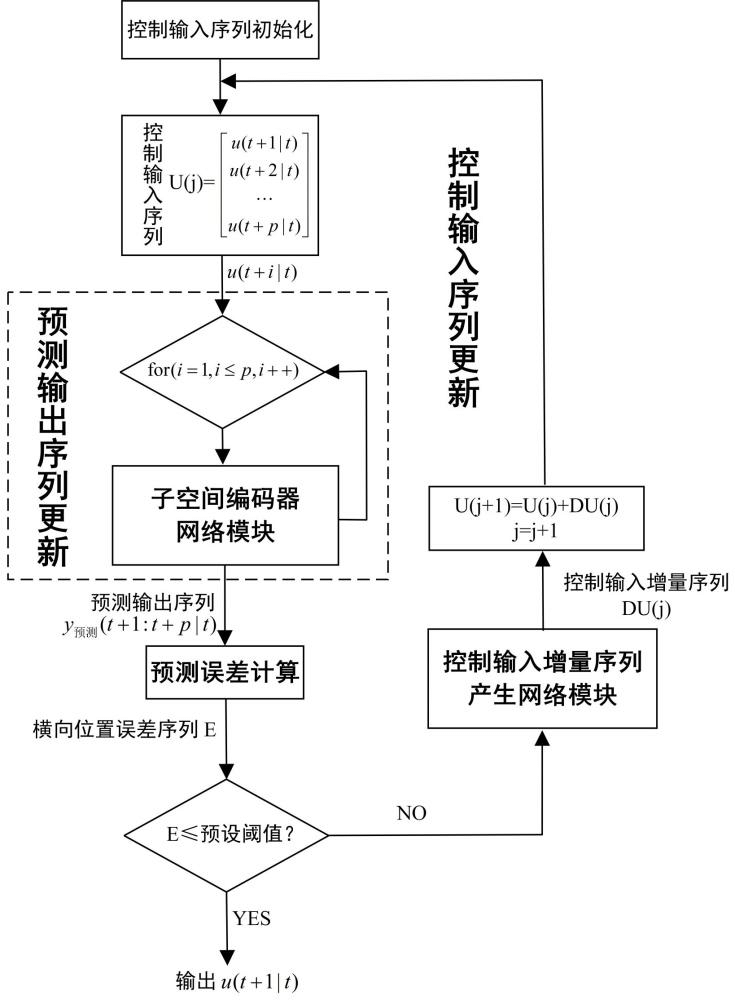
| 专利概述 | 基于双网络迭代优化的智能汽车路径跟踪控制方法,旨在解决模型预测控制在路径跟踪任务中计算量大、实时性不足的问题。本发明涉及自动驾驶领域,其特征在于,该方法包括子空间编码器网络模块和控制输入增量序列产生网络模块,具体实现包括预测输出序列更新和控制输入序列更新两个嵌套的循环过程。通过预测输出序列更新这一过程递归生成预测输出序列,通过控制输入序列更新这一过程得到横向位置误差序列,迭代优化控制输入序列。重复预测输出序列更新以及控制输入序列更新这两个循环更新过程,直至横向位置误差序列满足预设阈值。最终输出控制输入序列中的第一项作为车辆系统的实际输入,实现智能驾驶车辆的路径跟踪任务。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










