

| 专利名称 | 仿人机械手 | ||
|---|---|---|---|
| 申请号/专利号 | CN201010620611.8 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2010-12-29 | 授权日 | 2013-05-01 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 关节|运动范围|机器人|工程学|机械手|小指|中指|可达性|协调运动|电动机|无名指 | ||
| 应用领域 | 夹头 | ||
| 意向价格 | 具体面议 | ||
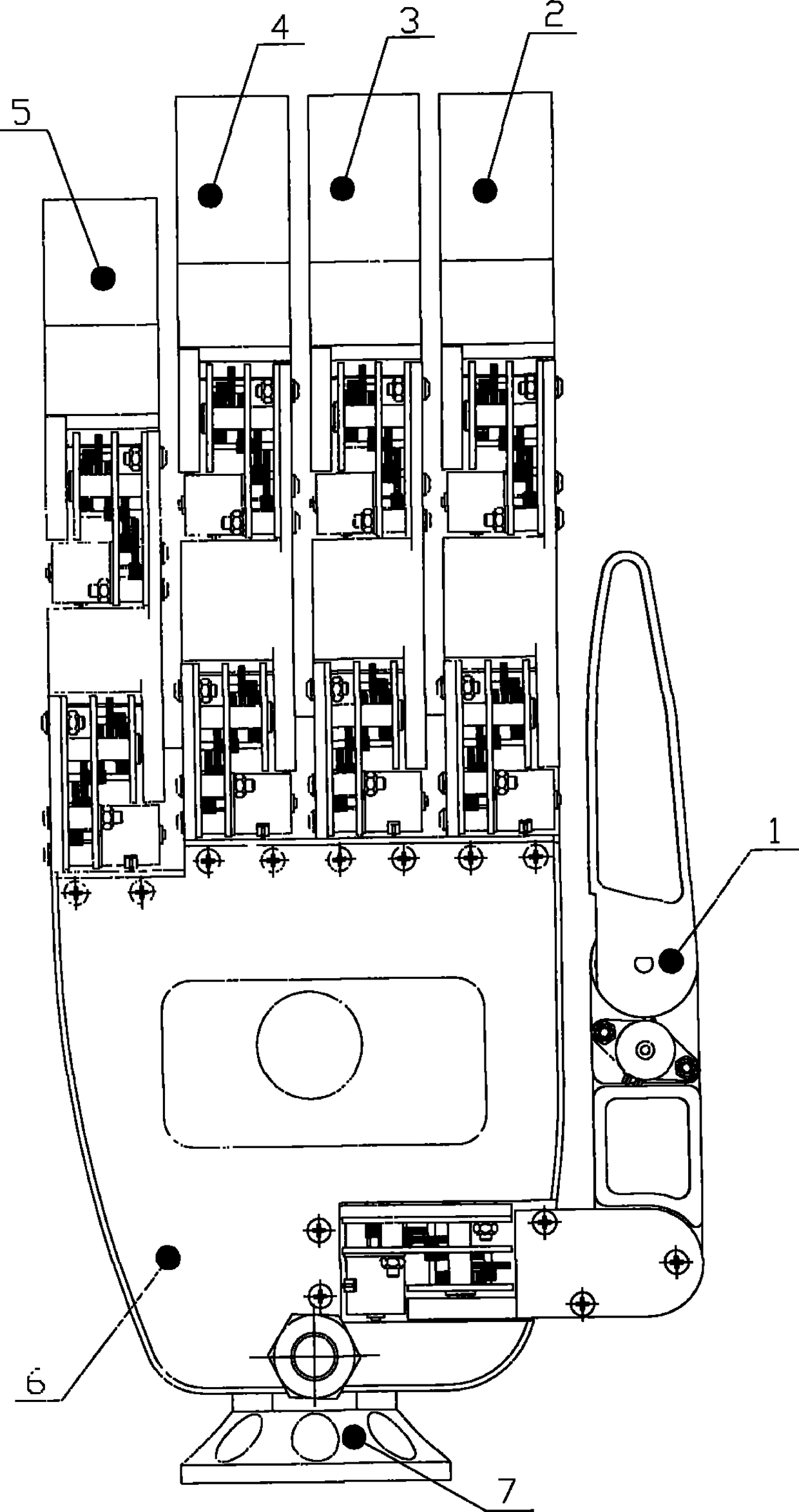
| 专利概述 | 本发明涉及一种仿人机械手,属于表演机器人的手部部件。具有两个摆动副的食指、中指、无名指、小拇指,具有三个摆动副的大拇指分别与手掌壳体固定连接,其中食指、中指、无名指、小拇指结构相同,各关节的摆动副包括一台电动机。优点是结构新颖,简捷紧凑、体积小、重量轻,各关节连接可靠,拆卸方便,手指预留空间可安装传感器,传动关系简单明了;手指运动范围大、灵活;安全性强、可达性强、个手指协调运动灵活,应用范围广。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










