

| 专利名称 | 越障侦察机器人 | ||
|---|---|---|---|
| 申请号/专利号 | CN201410716902.5 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2014-12-02 | 授权日 | 2016-11-09 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机器人|工程学|出行方式|地势|陆路旅行|机械传动|空中地面 | ||
| 应用领域 | 可转换为飞机的车 | ||
| 意向价格 | 具体面议 | ||
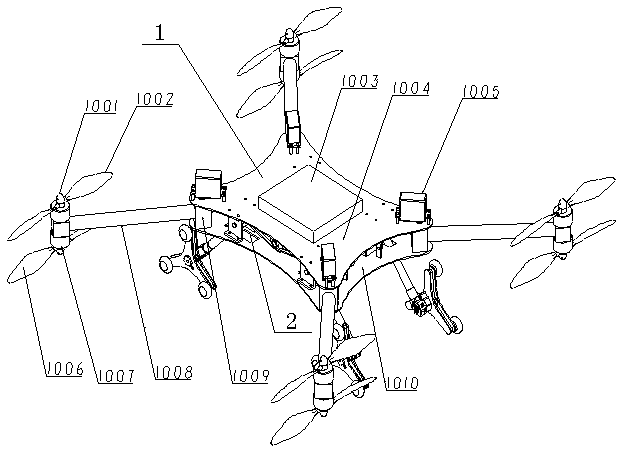
| 专利概述 | 本发明涉及一种越障侦察机器人,属于能在复杂路面行进和飞行越障的侦察机器人。飞行部分的上安装板通过腿管管夹支座与陆行部分的下安装板固定连接。本发明的有益效果是,陆行部分采用仿生腿和轮子结合的行进方式,兼顾越障和速度两方面性能;在陆空两栖转换时可以垂直起降,飞行部分没有机械传动,结构简单不易损坏易于维护。该机器人不仅具有地面快速行进能力同时兼备地面越障功能,还可以在任何地形的任意地点垂直起飞降落。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










