

| 专利名称 | 基于多智能体的非线性多单摆网络系统协调控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN201610023702.0 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2016-01-14 | 授权日 | 2019-04-30 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 网络系统|摆系统|重新设计|拓扑信息|角速度|环境变化|协调控制|计算机科学|误差方程|同步控制|输出反馈|系统稳定性|互动模型 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
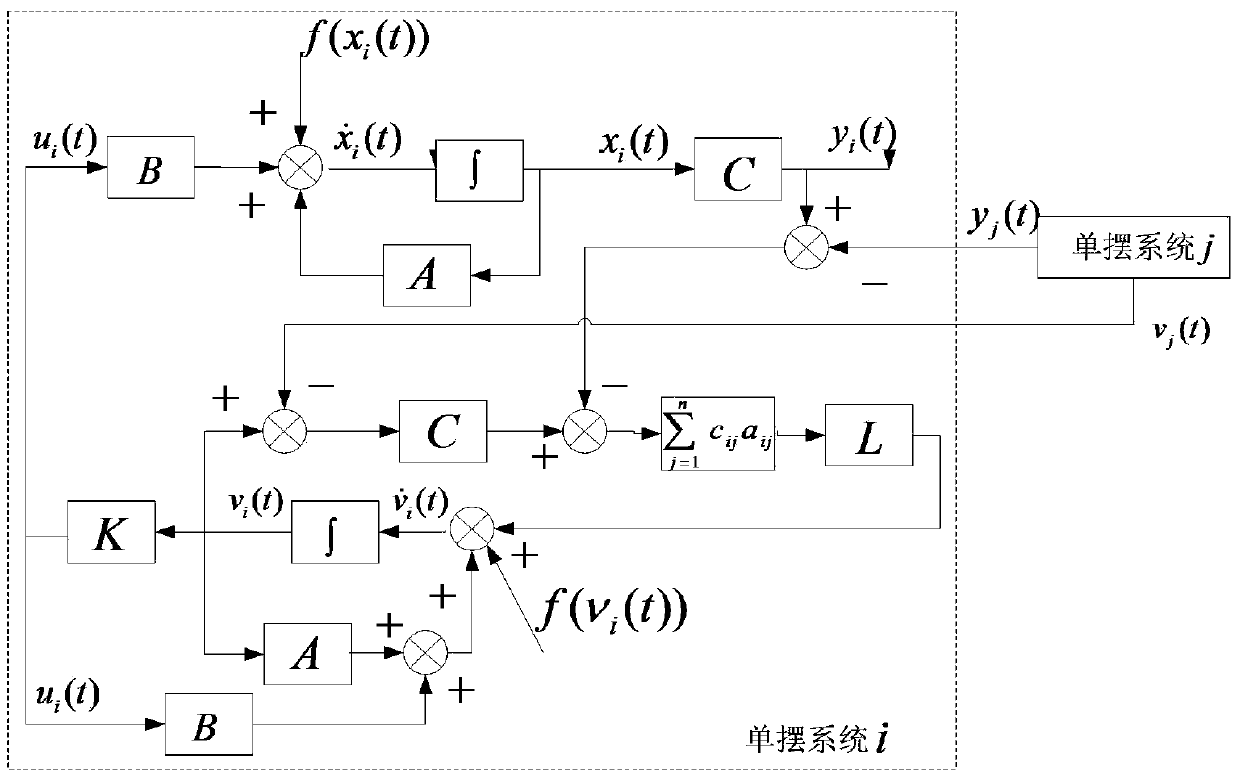
| 专利概述 | 基于多智能体的非线性多单摆网络系统协调控制方法,属于分布式协调控制技术领域,针对角速度这一状态信息不可测量的非线性多单摆网络系统,解决在无需依赖系统的全局拓扑信息情况下达到同步控制的问题,建立基于多智能体的非线性多单摆网络系统的运动模型和信息交互模型;建立基于多智能体的非线性多单摆网络系统的信息交互模型;基于动态输出反馈的完全分布式协调控制器设计;构造每个单摆系统的分布式误差方程;反馈增益及耦合增益求解及系统稳定性分析;避免因环境变化等因素导致系统拓扑结构变化而改变和影响系统的协调控制器,本发明无需针对不同的信息交互模型而重新设计和求解协调控制律,提高了协调控制律应用的灵活性。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










